通过
可通过FTP将RoboDK程序便捷传输至ABB机器人。
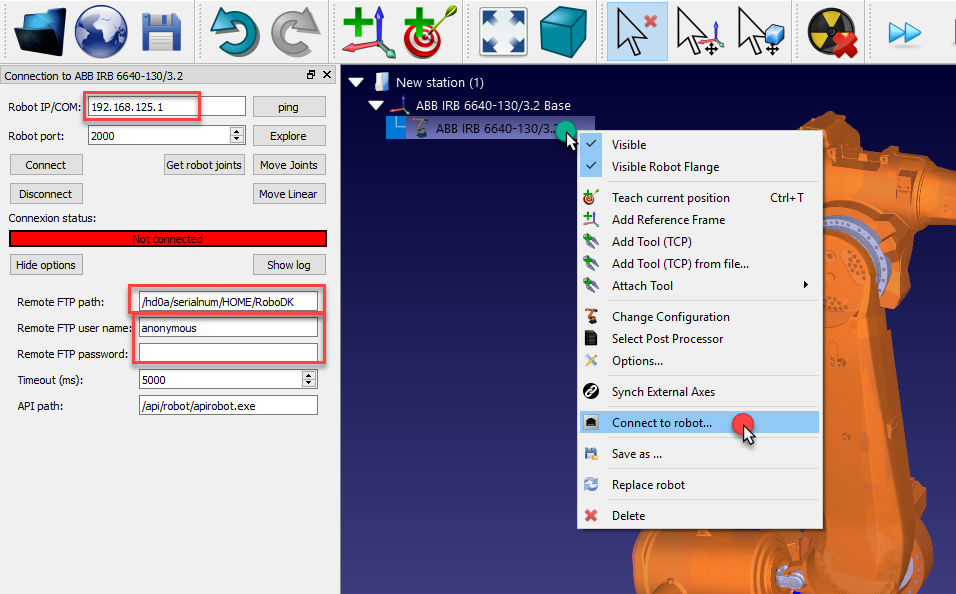
配置FTP连接:
1.在 RoboDK 中右击机器人。
2.选择:连接到机器人...。
3.输入机器人的 IP 地址。
4.输入远程FTP路径(完整路径可通过示教器或FileZilla FTP客户端获取)。
5.输入FTP凭据(默认匿名登录)。
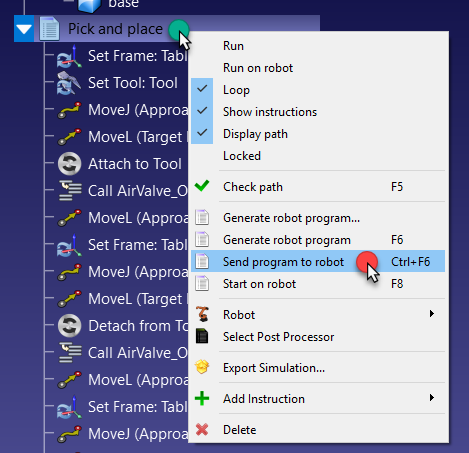
发送程序至机器人:
1.在RoboDK中右键点击目标程序。
2.点击:发送程序到机器人(Ctrl+F6)
这将生成程序,并尝试将其传输到机器人控制器。此时会弹出一个窗口,显示 FTP 传输是否成功。
通过FTP实时传输的程序需在机器人端通过RAPID编程加载。例如,以下代码可从名为MOD_Pick_and_place的模块中运行main_RoboDK程序:
MODULE RoboDK_FTP_Run_Program
! Enter the path to a folder with write access rights. Example
CONST string PATH_ROBODK := "/hd0a/robot-serial-num/HOME/RoboDK";
PERS string ftp_program_loaded := ";
PROC Main()
FTP_Run_Program;
ENDPROC
PROC FTP_Run_Program()
var num module_id := -1;
WHILE module_id <= 0 DO
TPErase;
TPReadNum module_id,"Enter the program to run. For example: to run Prog2 in Module Prog2.mod type 2.";
ENDWHILE
FTP_Run_Program_ID(module_id);
ENDPROC
PROC FTP_Run_Program_ID(num module_id)
VAR string path_module := "";
VAR string mod_to_unload;
IF module_id <= 0 THEN
RETURN;
ENDIF
path_module := PATH_ROBODK + "/Prog" + NumToStr(module_id, 0) + ".mod";
IF StrLen(ftp_program_loaded) > 0 THEN
mod_too_unload := ftp_program_loaded;
ftp_program_loaded := "";
UnLoad mod_to_unload;
ENDIF
Load path_module;
ftp_program_loaded := path_module;
TPWrite "Starting program:" + path_module;
! call the main program from the module sent and loaded
!%"main_RoboDK"%;
! call the numbered program (it should have the same effect)
%"Prog "+NumToStr(module_id,0)%;
TPWrite "Program completed";
ENDPROC
ENDMODULE
Tip: 在此处下载模块以运行通过FTP发送的程序。