Navigation offcanvas
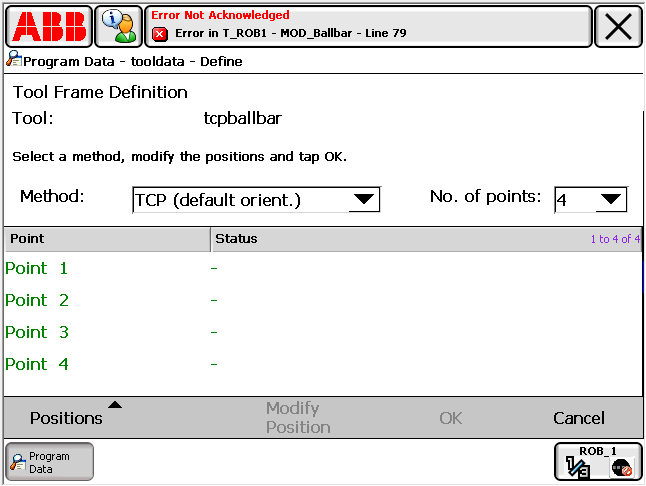
以下步骤用于创建或修改机器人工具数据(TCP,在ABB机器人编程中称为tooldata):
1.选择路径:ABB➔Program data➔ tooldata(双击)。
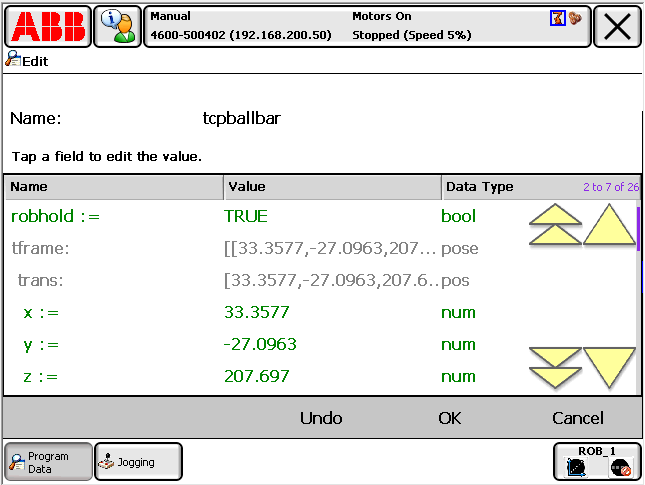
2.编辑工具数据:可创建新工具变量或修改现有变量。
3.获取TCP坐标:工具定义完成后,可读取TCP的X/Y/Z坐标值。