ABB机器人
RoboDK支持所有采用RAPID语言编程的ABB机器人,兼容PRG和MOD文件格式(适用于IRC5、S4及S4C机器人控制器)。本文档以IRC5型ABB机器人控制器为基准编写。
根据所选后处理器,RoboDK将自动处理大型程序的智能分段输出。
后续章节将通过ABB机器人示教器演示标准操作流程,例如:如何在RoboDK中创建新机器人程序并传输至实体机器人。
传输机器人程序
按照以下步骤将程序模块(MOD文件)从USB驱动器加载至ABB IRC5机器人控制器:
1.选择:ABB➔Program editor
2.选择:屏幕顶部的"Modules"选项卡
3.选择:File→Load module(若为新项目,程序指针/PP丢失无关紧要)
4.从USB磁盘选择MOD文件
5.确认:选择OK
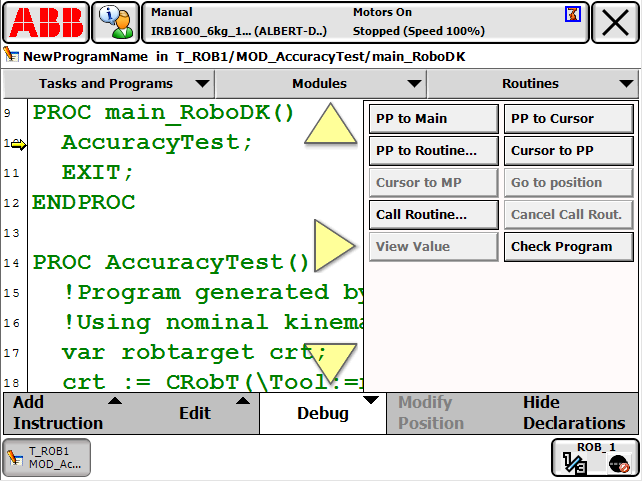
启动机器人程序
按照以下步骤在ABB IRC5控制器上启动特定机器人程序:
1.切换控制器至手动模式:顶部菜单栏应显示"Manual"标识
2.选择:ABB➔Program➔Debug➔PP to routine
3.选择程序:加载RoboDK生成的程序(根据所用后处理器,模块中可能已包含MainProg)
4.启用手动操作:持续按住示教器上的"dead man"急停开关;状态栏应显示"Motors On",且机器人橙色指示灯亮起。
5.启用程序:点击示教器上的播放按钮。
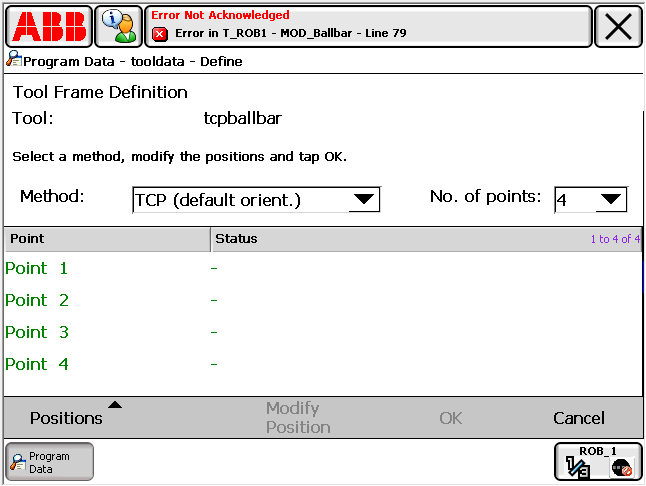
获取工具坐标系TCP
以下步骤用于创建或修改机器人工具数据(TCP,在ABB机器人编程中称为tooldata):
1.选择路径:ABB➔Program data➔ tooldata(双击)。
2.编辑工具数据:可创建新工具变量或修改现有变量。
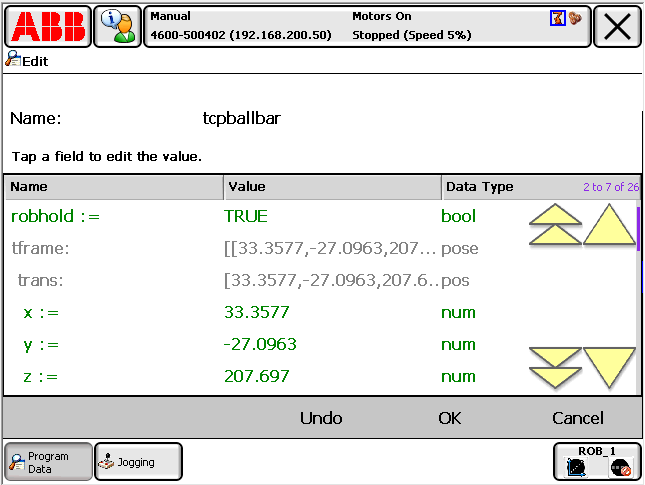
3.获取TCP坐标:工具定义完成后,可读取TCP的X/Y/Z坐标值。
通过 FTP 传输程序
可通过FTP将RoboDK程序便捷传输至ABB机器人。
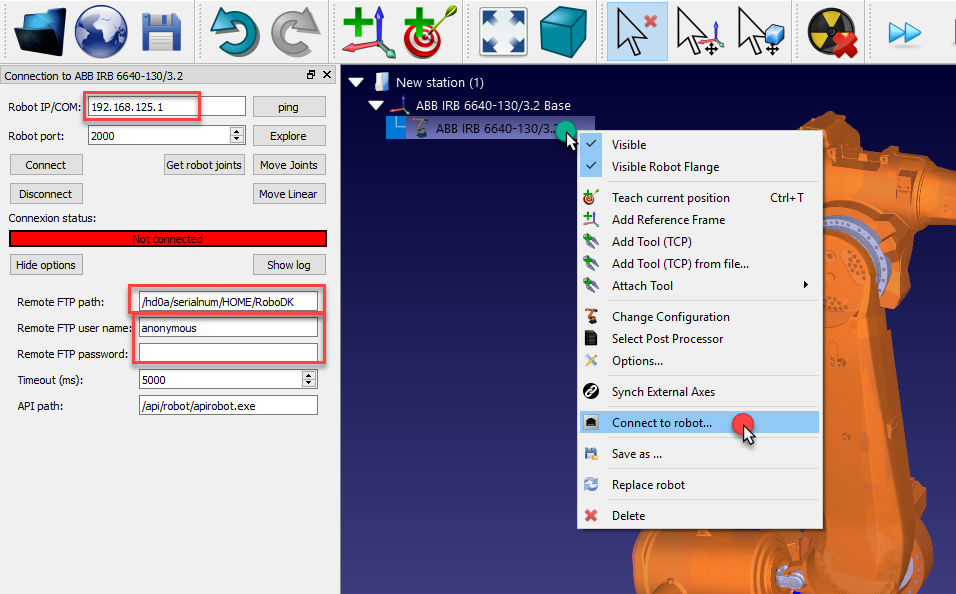
配置FTP连接:
1.在 RoboDK 中右击机器人。
2.选择:连接到机器人...。
3.输入机器人的 IP 地址。
4.输入远程FTP路径(完整路径可通过示教器或FileZilla FTP客户端获取)。
5.输入FTP凭据(默认匿名登录)。
发送程序至机器人:
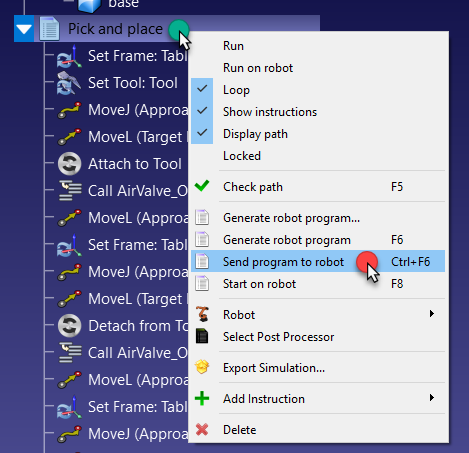
1.在RoboDK中右键点击目标程序。
2.点击:发送程序到机器人(Ctrl+F6)
这将生成程序,并尝试将其传输到机器人控制器。此时会弹出一个窗口,显示 FTP 传输是否成功。
通过FTP实时传输的程序需在机器人端通过RAPID编程加载。例如,以下代码可从名为MOD_Pick_and_place的模块中运行main_RoboDK程序:
MODULE RoboDK_FTP_Run_Program
! Enter the path to a folder with write access rights. Example
CONST string PATH_ROBODK := "/hd0a/robot-serial-num/HOME/RoboDK";
PERS string ftp_program_loaded := ";
PROC Main()
FTP_Run_Program;
ENDPROC
PROC FTP_Run_Program()
var num module_id := -1;
WHILE module_id <= 0 DO
TPErase;
TPReadNum module_id,"Enter the program to run. For example: to run Prog2 in Module Prog2.mod type 2.";
ENDWHILE
FTP_Run_Program_ID(module_id);
ENDPROC
PROC FTP_Run_Program_ID(num module_id)
VAR string path_module := "";
VAR string mod_to_unload;
IF module_id <= 0 THEN
RETURN;
ENDIF
path_module := PATH_ROBODK + "/Prog" + NumToStr(module_id, 0) + ".mod";
IF StrLen(ftp_program_loaded) > 0 THEN
mod_too_unload := ftp_program_loaded;
ftp_program_loaded := "";
UnLoad mod_to_unload;
ENDIF
Load path_module;
ftp_program_loaded := path_module;
TPWrite "Starting program:" + path_module;
! call the main program from the module sent and loaded
!%"main_RoboDK"%;
! call the numbered program (it should have the same effect)
%"Prog "+NumToStr(module_id,0)%;
TPWrite "Program completed";
ENDPROC
ENDMODULE
Tip: 在此处下载模块以运行通过FTP发送的程序。
ABB机器人RoboDK驱动器
通过RoboDK可实现与ABB机器人的在线连接,直接从PC端控制机器人运动。
此功能支持"在机器人上运行"选项,用于在线编程与调试。连接方式支持以太网(TCP/IP)或串口(RS232)通信。
机器人驱动提供了离线编程之外的另一种选择,支持将仿真程序直接部署到实体机器人运行(在线编程)。更多信息详见机器人驱动器章节。
Important:使用以太网连接需确保ABB机器人已激活"PC Interface"软件选项(包含Socket通信功能)。
Important:Windows 11系统可能不兼容部分USB转RS232串口转换器。
驱动设置步骤:
1.物理连接:用网线连接电脑与机器人(若使用串口通信则需RS232连接线)。
2.获取驱动文件:从客户专区下载ABB专用MOD驱动文件。
3.加载驱动模块:通过USB/FTP/RobotStudio将RDK_DriverSocket.mod模块传输至机器人(该模块已包含Main程序调用,需设为主任务)
串口方案替代方案:使用RDK_DriverSerial.mod模块
示教器操作流程:
a.路径:ABB➔Program Editor
b.选择:Tasks和Programs(位于顶部)
c.选择:Show Modules(在底部)
d.选择:File➔Load Module...(出现程序指针丢失提示时选"Yes")
e.选择mod 文件后确认。
4.启动程序:运行RoboDK_Driver.mod 中的主程序。
Note:IP修改:使用RDK_DriverSocket.mod时需检查第37行机器人IP变量(默认值):
CONST 字符串 SERVER_IP := "192.168.125.1";
端口设置:默认通信端口为2000,支持自定义修改