夹爪配置
关于如何正确定义与后处理器兼容的夹爪指令,请参阅前一个章节:夹爪仿真。该方法能准确定义GPL项目中的位置数据,避免夹爪轴系意外移动。
现有Brooks PreciseFlex IntelliGuide夹爪型号包括:
1.Brooks PreciseFlex IntelliGuide s23
2.Brooks PreciseFlex IntelliGuide s60
3.Brooks PreciseFlex IntelliGuide s23D
4.Brooks PreciseFlex IntelliGuide v23
5.Brooks PreciseFlex IntelliGuide v60
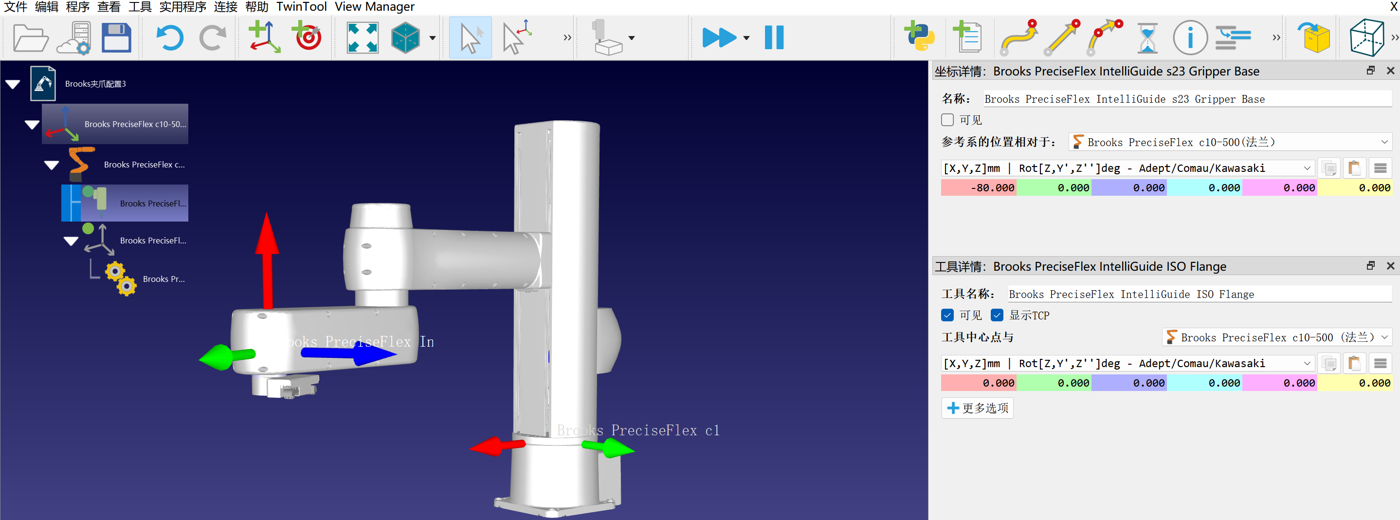
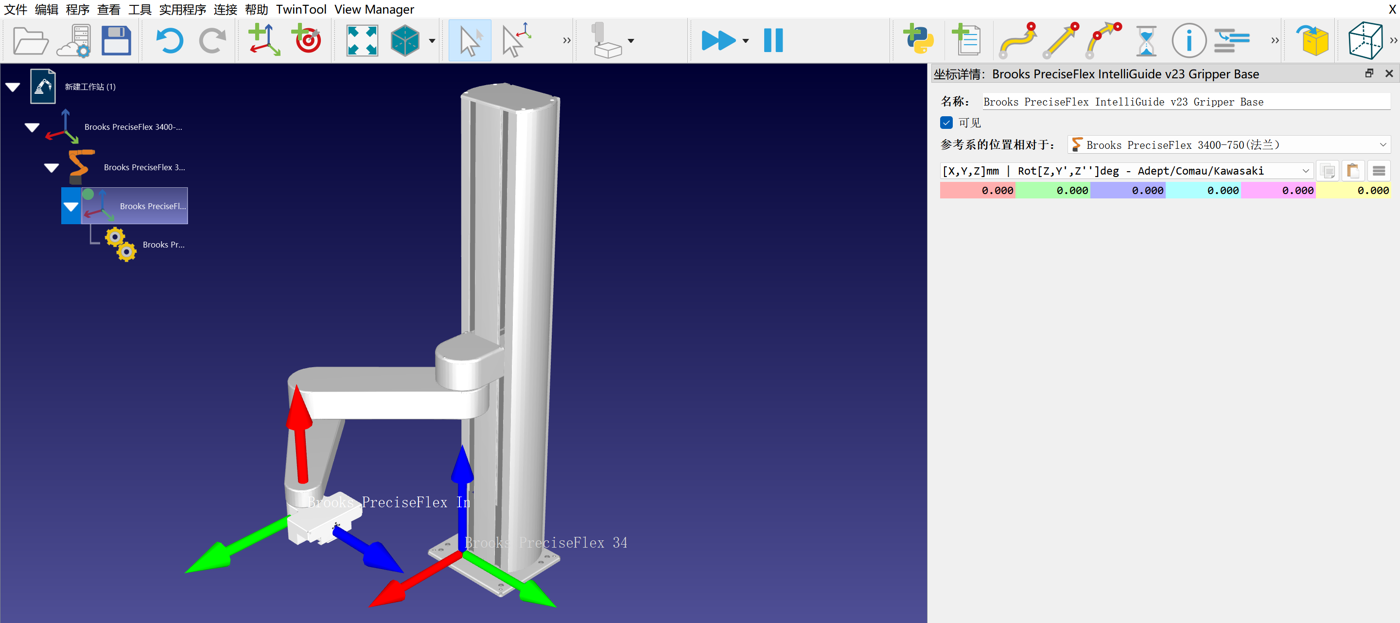
各型号夹爪的基坐标系定义均不相同。为正确安装夹爪至机器人法兰坐标系,需使用以下参考位置数据:
| IntelliGuide s23 | IntelliGuide s60 | IntelliGuide s23D | IntelliGuide v23 | IntelliGuide v60 |
| |
PreciseFlex 400 | [0.603,0,0,0,0,0] | N/A | N/A | [0,0,0,0,0,0] | N/A | ||
PreciseFlex 3400 | [0.033,0,0,0,0,0] | [0.033,0,0,0,0,0] | [0.033,0,0,0,0,0] | [-0.57,0,0,0,0,0] | [0,0,0,0,0,0] | ||
PreciseFlex DD 4-axis | [-70.5,0,0,0,180,180] | [-70.5,0,0,0,180,180] | [-70.5,0,0,0,180,180] | [-71.1,0,0,0,180,180] | [-71.5,0,0,0,180,180] | ||
PreciseFlex c10 | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | ||
PreciseFlex c3 | [0.313,0,0,0,0,0] | [0.313,0,0,0,0,0] | [0.313,0,0,0,0,0] | [-0.291,0,0,0,0,0] | [0.279,0,0,0,0,0] | ||
PreciseFlex c3x | [-14.655,0,0,0,0,0] | [-14.655,0,0,0,0,0] | [-14.655,0,0,0,0,0] | [-15.258,0,0,0,0,0] | [-14.688,0,0,0,0,0] | ||
PreciseFlex c5 | [113,0,0,0,0,0] | [113,0,0,0,0,0] | [113,0,0,0,0,0] | [112.4,0,0,0,0,0] | [113,0,0,0,0,0] |
对于Brooks PreciseFlex DD 4轴和c10机型,需从机器人库加载IntelliGuide ISO法兰模型用于可视化(DD 4轴机器人的ISO法兰几何体需上移9mm)。