直线导轨
由于PreciseFlex机器人的基座框架并非安装在机器人物理基座处,因此需要在PreciseFlex机器人与PreciseFlex直线导轨之间设置特定偏移量。
Brooks PreciseFlex 直线导轨0度配置:
a.Brooks PreciseFlex 400:[118,0,45.6,0,0,0]
b.Brooks PreciseFlex 3400: [118,0,62.6,0,0,0]
Brooks PreciseFlex 直线导轨 -90 度配置:
a.Brooks PreciseFlex 400:[101.6, 0, 45.6, 0, 0, 0]
b.Brooks PreciseFlex 3400:[101.6,0,62.6,0,0,0]
必须同步直线导轨轴位置才能使后处理器进行坐标计算,具体方法信息参考https://robodk.com/doc/cn/General.html#SyncAxes章节。
为正确保存机器人世界坐标系中的目标点,并确保这些目标点可在后处理器生成的GPL项目中调用,用户需新建一个参考坐标系。该坐标系需基于工作站参考坐标系定义,且必须采用前文所述的机器人基座与线性导轨间相同偏移量(即上述数据)。所有目标点均需相对于该参考坐标系进行定义。
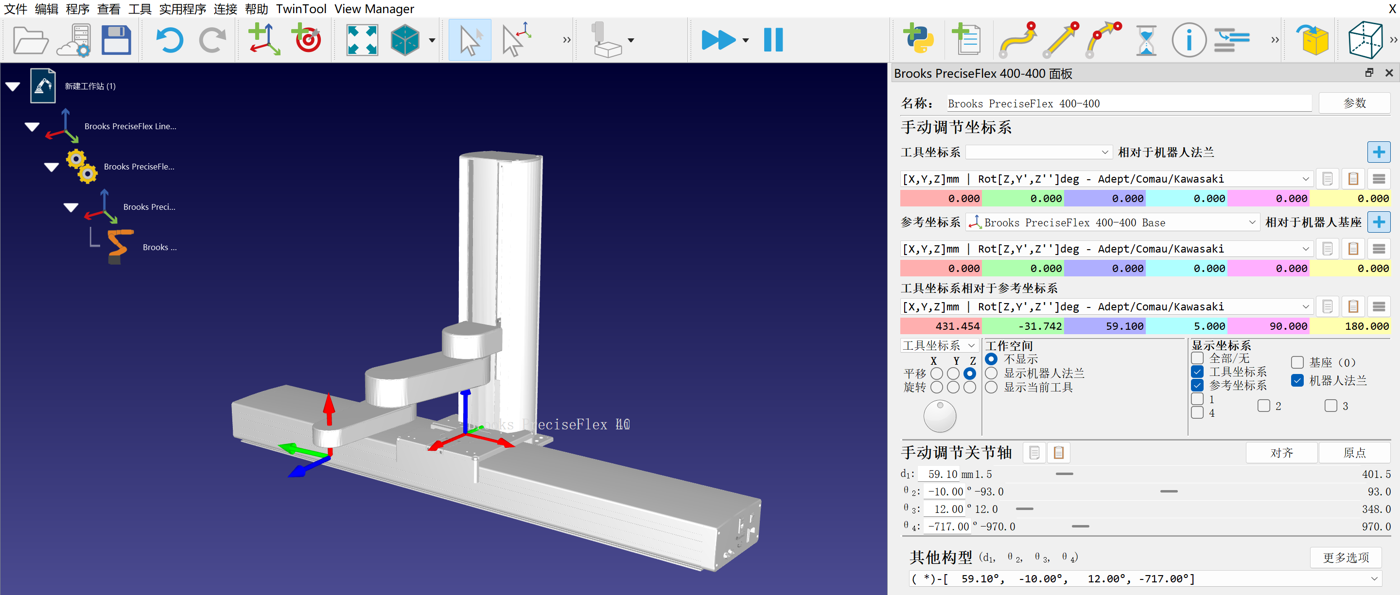
下图展示了0度配置下搭载于1米线性导轨的PreciseFlex 400机器人,以及被定义为机器人世界坐标系的参考坐标系示意图。
生成GPL项目后,使用任意文本编辑器打开Main.gpl文件,并注释掉定义机器人基础参考坐标系的那一行代码: