后处理器
本节介绍与生成Brooks机器人程序相关的注意事项。
工具中心点 (TCP)
RoboDK中的工具中心点(TCP)必须与机器人控制器中定义的TCP保持一致。若使用夹爪机构,需通过"添加工具(TCP)"功能设置符合夹爪实际位置的TCP。新建工具TCP应与夹爪机构TCP完全匹配。Brooks PreciseFlex机器人的TCP参数可通过网页界面按以下路径查询:
1.Admin
2.Setup – Parameter Database
3.Robot
4.Joint/Cartesian control
5.Dynamic Parameters
6.DataID 16051
夹爪配置
关于如何正确定义与后处理器兼容的夹爪指令,请参阅前一个章节:夹爪仿真。该方法能准确定义GPL项目中的位置数据,避免夹爪轴系意外移动。
现有Brooks PreciseFlex IntelliGuide夹爪型号包括:
1.Brooks PreciseFlex IntelliGuide s23
2.Brooks PreciseFlex IntelliGuide s60
3.Brooks PreciseFlex IntelliGuide s23D
4.Brooks PreciseFlex IntelliGuide v23
5.Brooks PreciseFlex IntelliGuide v60
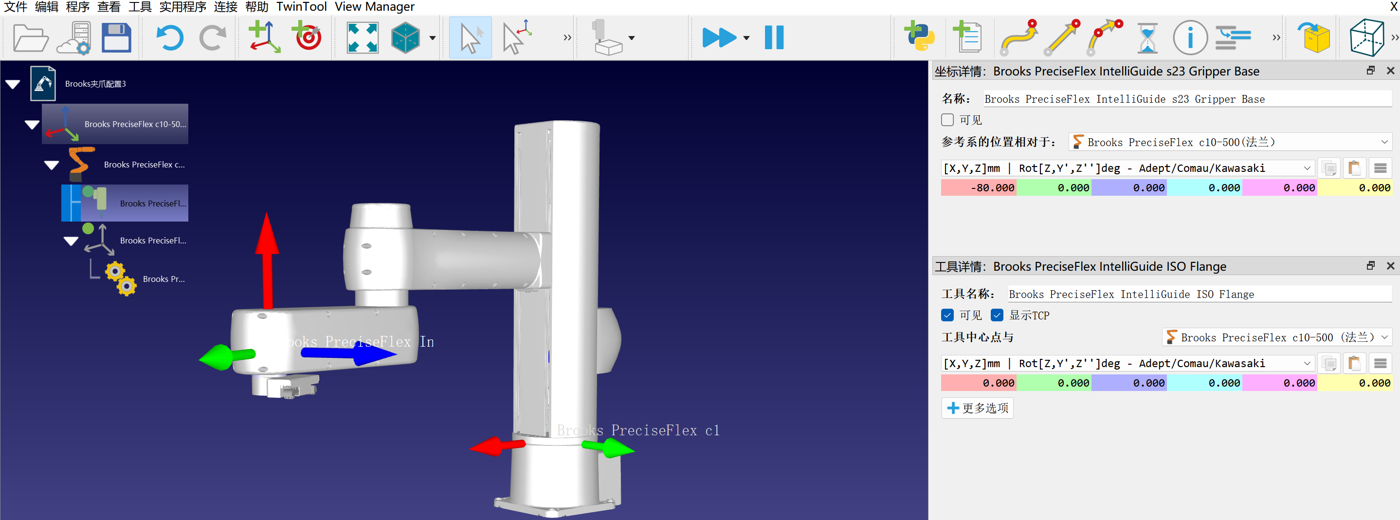
各型号夹爪的基坐标系定义均不相同。为正确安装夹爪至机器人法兰坐标系,需使用以下参考位置数据:
| IntelliGuide s23 | IntelliGuide s60 | IntelliGuide s23D | IntelliGuide v23 | IntelliGuide v60 |
| |
PreciseFlex 400 | [0.603,0,0,0,0,0] | N/A | N/A | [0,0,0,0,0,0] | N/A | ||
PreciseFlex 3400 | [0.033,0,0,0,0,0] | [0.033,0,0,0,0,0] | [0.033,0,0,0,0,0] | [-0.57,0,0,0,0,0] | [0,0,0,0,0,0] | ||
PreciseFlex DD 4-axis | [-70.5,0,0,0,180,180] | [-70.5,0,0,0,180,180] | [-70.5,0,0,0,180,180] | [-71.1,0,0,0,180,180] | [-71.5,0,0,0,180,180] | ||
PreciseFlex c10 | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | [-82.5,0,0,0,180,180] | ||
PreciseFlex c3 | [0.313,0,0,0,0,0] | [0.313,0,0,0,0,0] | [0.313,0,0,0,0,0] | [-0.291,0,0,0,0,0] | [0.279,0,0,0,0,0] | ||
PreciseFlex c3x | [-14.655,0,0,0,0,0] | [-14.655,0,0,0,0,0] | [-14.655,0,0,0,0,0] | [-15.258,0,0,0,0,0] | [-14.688,0,0,0,0,0] | ||
PreciseFlex c5 | [113,0,0,0,0,0] | [113,0,0,0,0,0] | [113,0,0,0,0,0] | [112.4,0,0,0,0,0] | [113,0,0,0,0,0] |
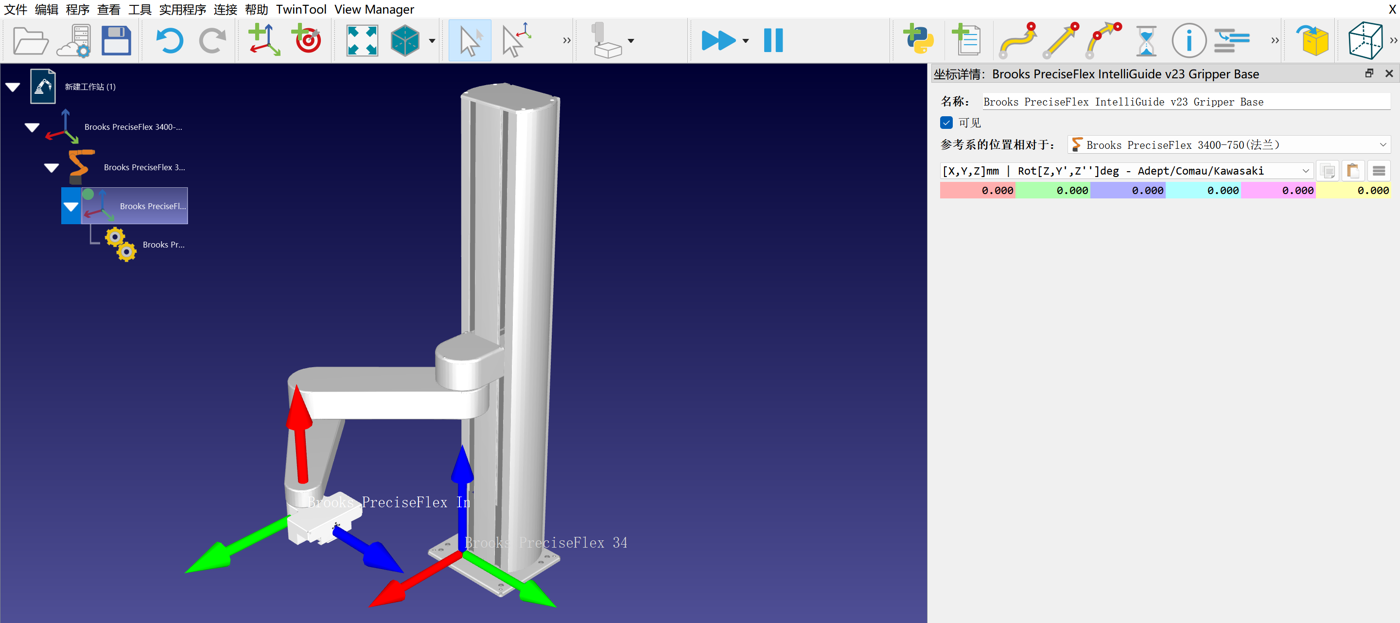
对于Brooks PreciseFlex DD 4轴和c10机型,需从机器人库加载IntelliGuide ISO法兰模型用于可视化(DD 4轴机器人的ISO法兰几何体需上移9mm)。
取整
输入值-1表示机器人将在运动终点完全停止并启用严格位置误差约束(对应GPL代码:prof1.InRange = 100)。
输入值0表示机器人将在运动终点停止但采用宽松位置误差约束(对应GPL代码:prof1.InRange = 10)。
输入正值表示机器人将执行平滑过渡运动而不完全停止(对应GPL代码:prof1.InRange = -1)。
速度与加速
有Brooks PreciseFlex机器人的最大线速度、角速度及关节速度/加速度参数可通过网页界面按以下路径查询:
1.Admin
2.Setup – Parameter Database
3.Robot
4.Joint/Cartesian control
5.Dynamic Parameters
6.DataIDs 2700, 2701, 2702, and 2703
用户可参照上述数据ID值设置RoboDK速度/加速度指令的输入参数。后处理器将根据这些基准值,按GPL Profile类的要求计算出各机器人最大速度/加速度的百分比值。要更改后处理器使用的限制,可以根据使用的具修改后处理器限值时,需根据具体机型调整后处理器参数。默认配置适用于PreciseFlex 400和3400机型,修改方法参见文档章节:https://robodk.com/doc/en/Post-Processors.html#PPEditor。
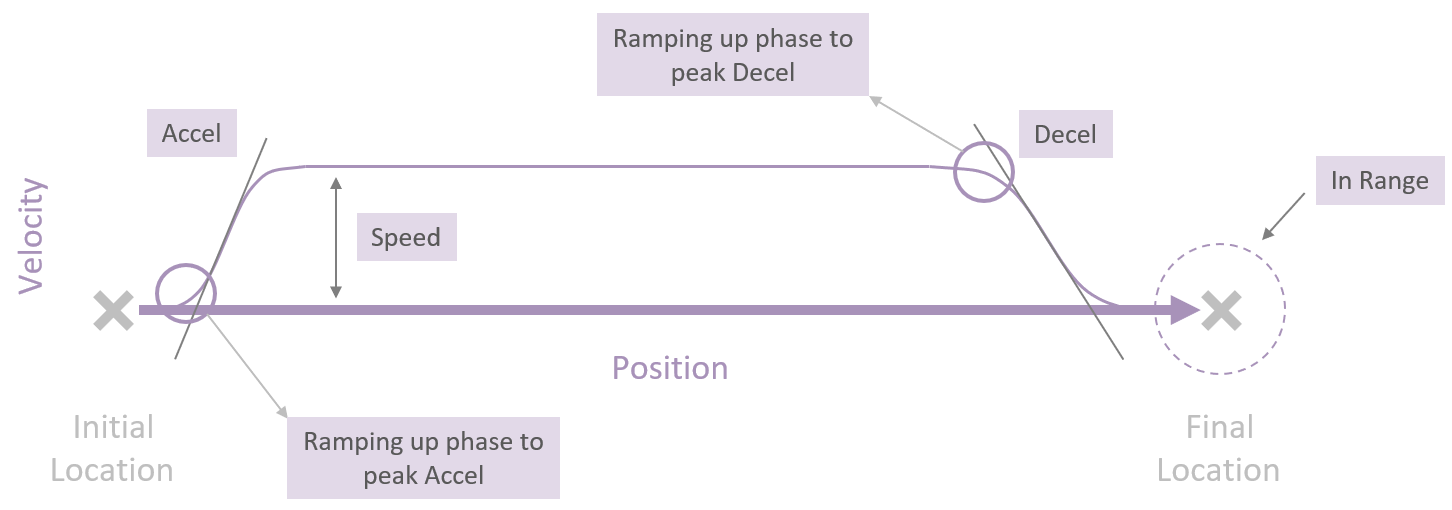
当线加速度/角加速度指令输入值小于1时,该值将被视为达到峰值加速度/减速度所需的斜坡时间(秒)(对应GPL代码:prof1.AccelRamp/prof1.DecelRamp = 输入值)。
下图展示了控制器规划机器人运动轨迹的相关原理。
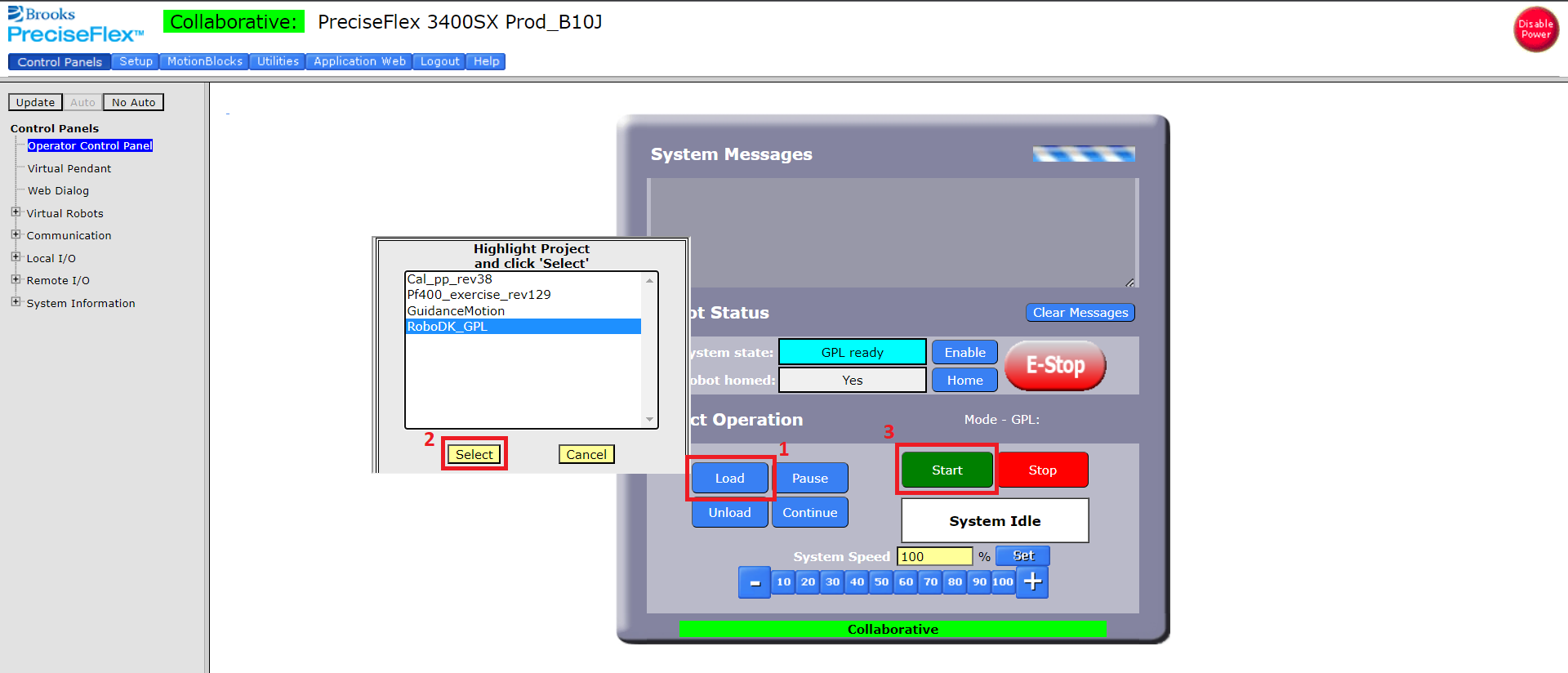
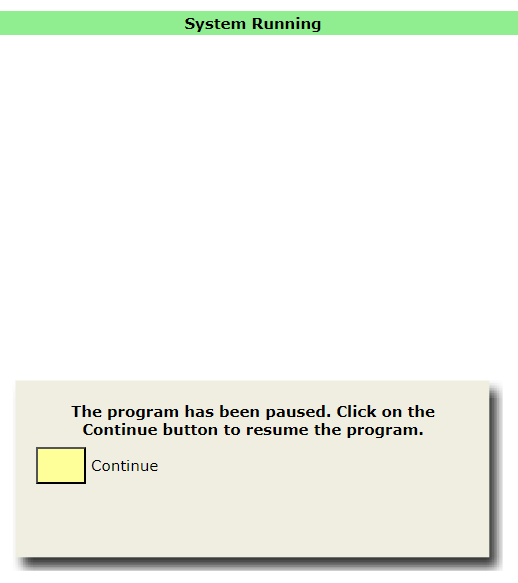
暂停指令
输入正值将生成对应时长的程序暂停命令(单位:秒)。输入负值将在网页操作控制面板弹出对话框,用户点击按钮:Continue,前程序保持暂停状态。查看对话框需点击控制面板上的按钮:Dialog Active。