速度与加速
有Brooks PreciseFlex机器人的最大线速度、角速度及关节速度/加速度参数可通过网页界面按以下路径查询:
1.Admin
2.Setup – Parameter Database
3.Robot
4.Joint/Cartesian control
5.Dynamic Parameters
6.DataIDs 2700, 2701, 2702, and 2703
用户可参照上述数据ID值设置RoboDK速度/加速度指令的输入参数。后处理器将根据这些基准值,按GPL Profile类的要求计算出各机器人最大速度/加速度的百分比值。要更改后处理器使用的限制,可以根据使用的具修改后处理器限值时,需根据具体机型调整后处理器参数。默认配置适用于PreciseFlex 400和3400机型,修改方法参见文档章节:https://robodk.com/doc/en/Post-Processors.html#PPEditor。
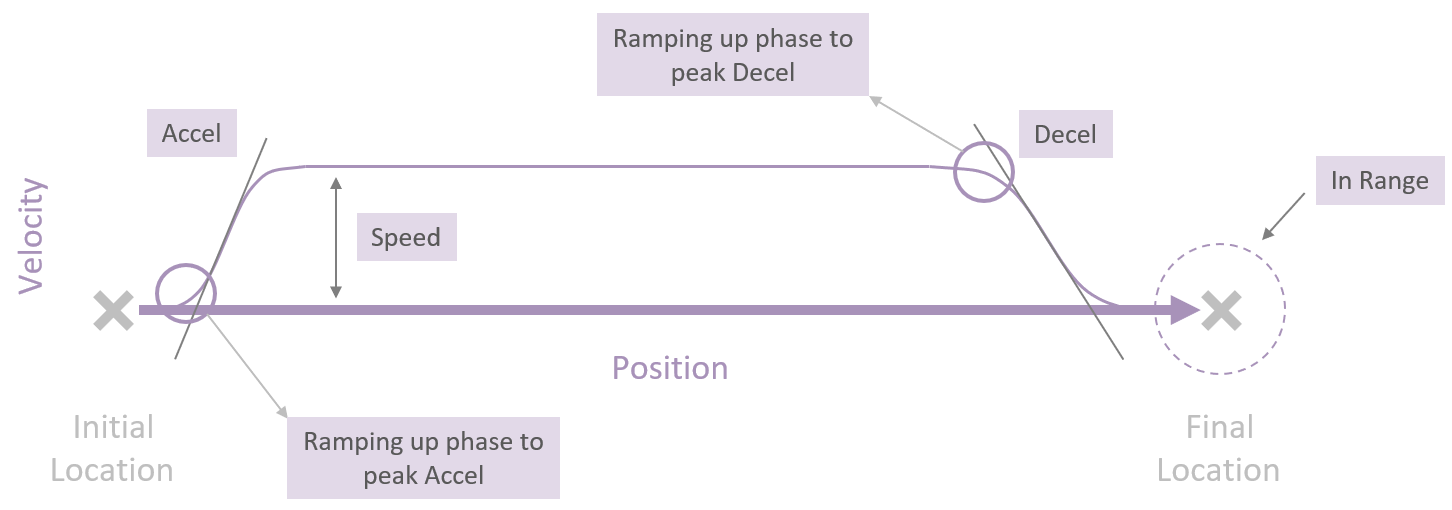
当线加速度/角加速度指令输入值小于1时,该值将被视为达到峰值加速度/减速度所需的斜坡时间(秒)(对应GPL代码:prof1.AccelRamp/prof1.DecelRamp = 输入值)。
下图展示了控制器规划机器人运动轨迹的相关原理。