柯马(Comau)机器人
本节文档概述了使用柯马(Comau)机器人时的一些常用操作,例如在RoboDK 生成程序并将其加载到柯马(Comau)机器人的控制器中。
传输机器人程序
本节介绍如何将程序上传到柯马(Comau)机器人的控制器中。
通过 FTP,将程序表格加载到程序内存中的操作:
1.在机器人连接选项卡中正确配置IP地址。若FTP用户名和密码非默认值,可在more options中设置
2.传输程序时,右键点击程序选择:Send to robot
3.在机器人示教器主界面点击进入菜单:Files
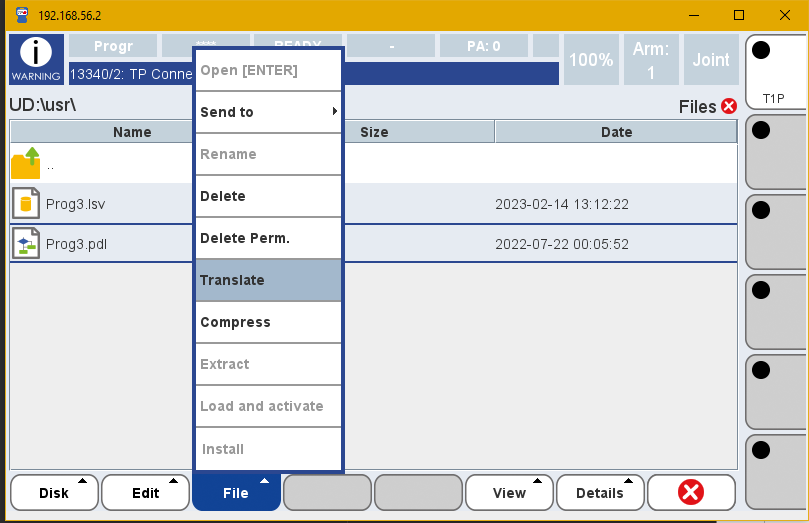
4.选择PDL程序文件及对应的LSV文件(如需要,点击:File->Translate,生成编译版本)
5.编译后的文件可通过主界面选项:Prog,加载至内存并运行
在RoboShop中使用虚拟机器人时,建议增加最大FTP连接数,以避免文件传输时示教器断开连接。
操作步骤如下:
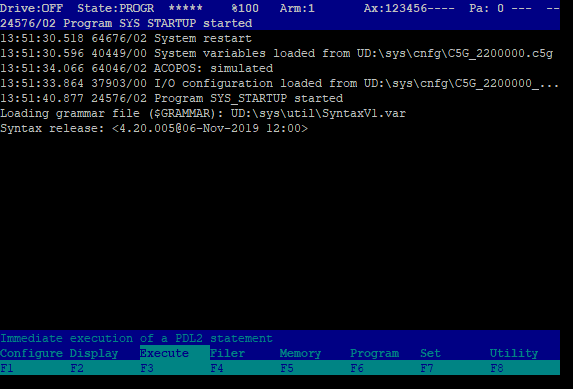
1.打开虚拟机器人终端
2.选择:Execute(F3)
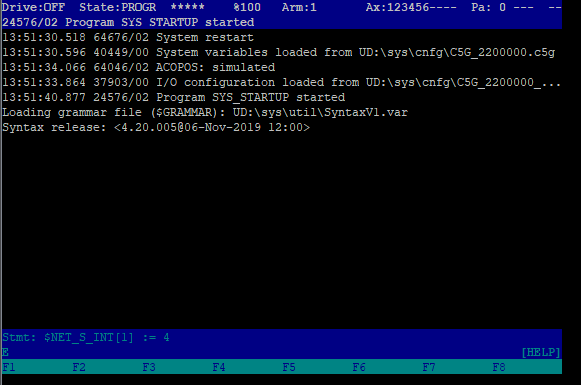
3.输入指令:$NET_S_INT[1] := 4
4.首次按Enter,确认语句
5.再次按Enter,执行指令
选择后处理器
为Comau机器人生成程序时,需根据机器人配置选择MODAL或NODAL模式的后处理器:
- Nodal程序:右键机器人选择:Select post processor→Comau Nodal
- Modal程序:右键机器人选择Select post processor后任选其一:
● Comau C5G
● Comau C5G Joints
驱动程序配置
要实现柯马(Comau)机器人的在线编程功能。需按以下步骤配置驱动程序,运行驱动器 PDL 程序文件。
Note: 下载柯马(Comau)机器人控制器的 RoboDK 驱动程序。
设置过程:
1.将 RoboDKdriver.pdl 文件传输到柯马(Comau)机器人控制器。将RoboDKdriver.pdl文件传输至机器人控制器
2.手动启动该程序(将机器人转为服务器模式)
3.从RoboDK连接机器人
默认使用的通信端口为 1102,但可以在 RoboDKdriver.pdl 文件中进行更改。