电装驱动配置
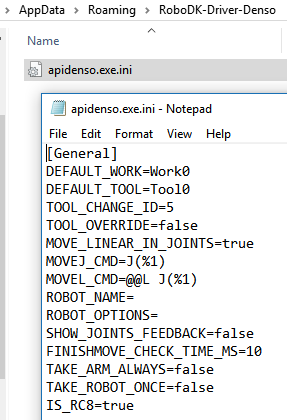
通过编辑配置文件可深度定制RoboDK电装驱动行为,文件路径:
%APPDATA%/RoboDK-Driver-Denso/apidenso.exe.ini
通过这些自定义功能,可以指定运动类型或同时驱动多个机器人。任何文本编辑器都可用于修改该文件。
Note:在文件管理器地址栏输入%APPDATA%可快速访问。
Note:删除此文件后重新连接机器人可恢复默认设置。
关键配置参数:
●DEFAULT_WORK - 默认工件坐标系(字符串变量)。
●DEFAULT_TOOL - 默认工具坐标系。
Important: 若直线运动以笛卡尔坐标给出,工具定义需与RoboDK一致。
●TOOL_CHANGE_ID:切换工具时使用的备用工具变量(如5=Tool5)
●MOVE_LINEAR_IN_JOINTS:设为false时直线运动以笛卡尔坐标执行
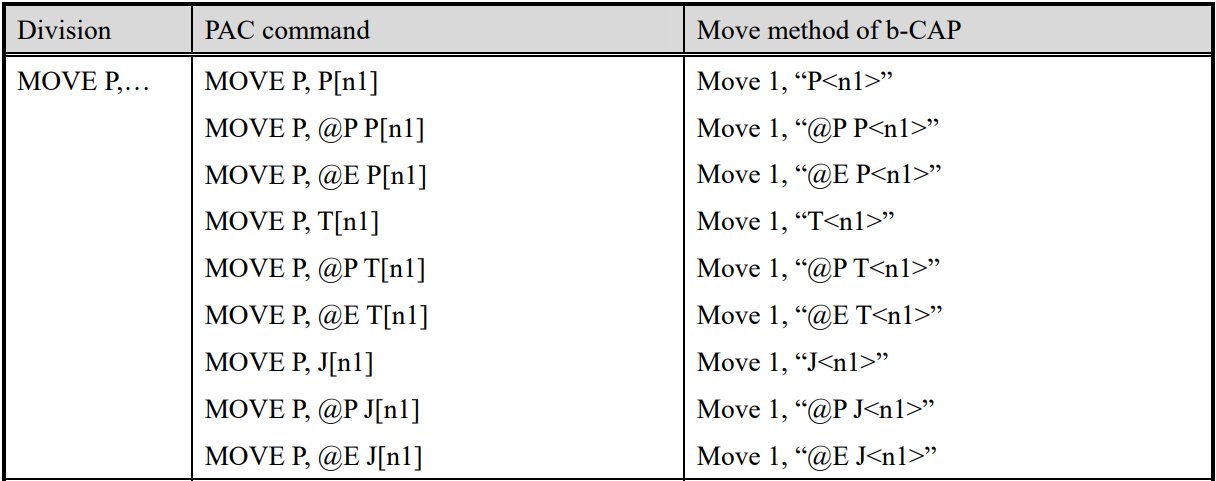
●MOVEJ_CMD :关节运动指令(详见参数表)
●MOVEL_CMD – 直线运动指令(详见参数表)
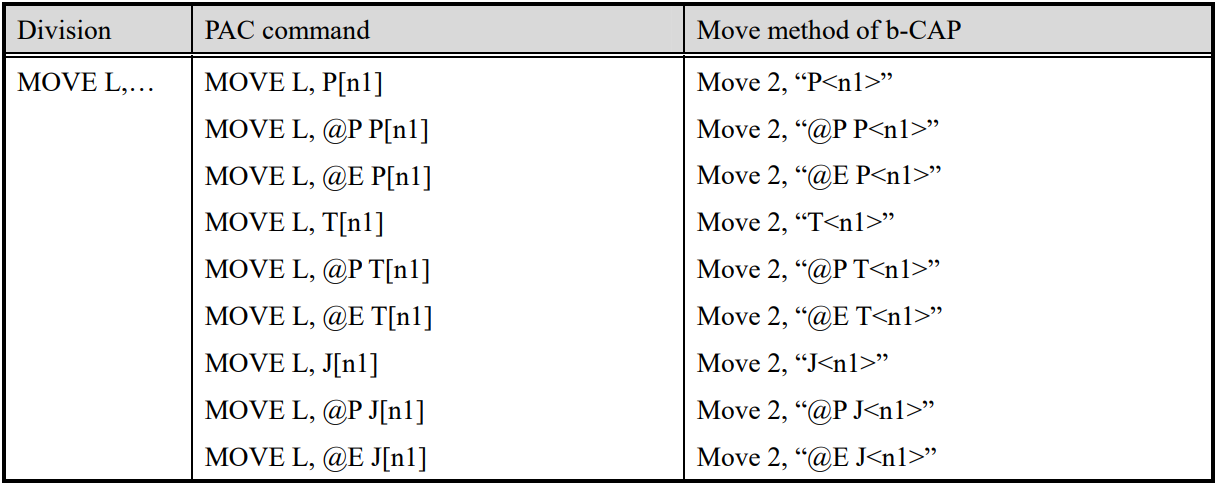
Important:INI文件中需包含两个@字符表示运动圆整。
Important:%1表示关节/笛卡尔数据位置。
●ROBOT_NAME:指定控制器中的机器人名称
●ROBOT_OPTIONS:机器人资源选项(如从机器人需设置ID=1,主机器人默认为0)
●SHOW_JOINTS_FEEDBACK:实时显示关节反馈(可能降低性能)
●FINISH_MOVE_CHECK_MS:关节反馈刷新频率(毫秒)
●TAKE_ARMS_ALWAYS/TAKE_ROBOT_ONCE:控制器资源占用模式(提升速度但可能引发异常)
●IS_RC8:连接RC7及旧版控制器时设为false
Note:修改后需断开重连以生效。双击断开,然后再次点连接 。
Tip:默认驱动路径:C:/RoboDK/api/Robot/apidenso.exe。复制驱动文件并重命名可支持多机器人同时连接,系统会自动生成新INI文件。