从
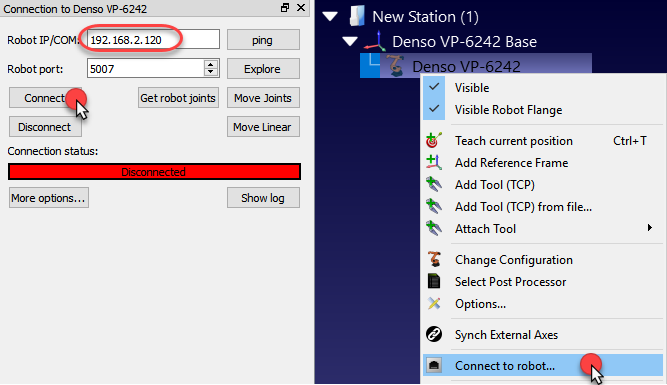
建立网络连接后,可通过RoboDK直接控制实体机器人:
1.右键点击RoboDK中的机器人
2.选择:
3.输入机器人IP地址
4.点击连接
连接成功时状态栏显示绿色"Ready"。
如果连接成功,应显示 "Ready"的绿色信息。
通过连接菜单可执行以下操作:获取关节值、关节运动和直线线性,即可移动机器人。
Note:需按前文步骤激活b-Cap服务器。
Tip:若机器人无响应,双击"断开连接"强制终止驱动进程,重新连接即可恢复。
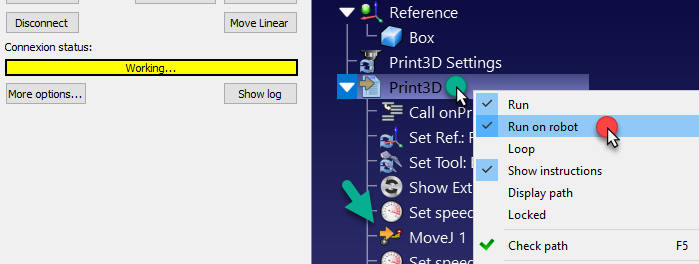
程序的一个选项:在机器人上运行,可同步仿真与实体机器人运动(在线编程),适用于调试:
1.右键单击程序(如下图所示,Print3D)
2.选择:在机器人上运行
3.双击程序启动(或右击并选择:运行)
启用后,每次运行程序都会自动连接实体机器人。
该功能亦可通过RoboDK API (支持Python/C#等语言)实现,便于与其他应用集成。