驱动高级配置
你可以通过INI文件配置驱动器的其他设置。这样你就可以配置如何映射外部轴。
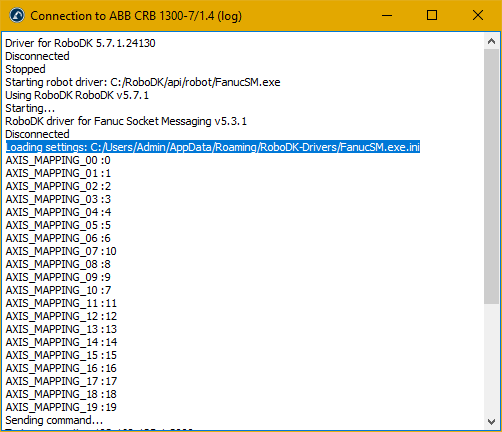
首次运行驱动程序时,它会生成一个包含配置高级参数(如外部轴映射)标志的文件。该设置文件的位置可在驱动程序日志开头以"Loading settings"开头的行中找到。
Tip:如需多组配置,可复制驱动文件并重命名。
你可以使用任意文本编辑器打开此配置文件,其中列出了RoboDK中使用的各轴与发那科机器人控制器中各轴的对应关系。此外,你还可以启用额外的调试信息打印功能,以及修改要使用的运动组数量。
举例说明:若RoboDK中的第8轴对应机器人控制器的第9轴,你只需将配置文件右侧的数值修改为正确对应值即可。修改后的映射关系可以在启动信息中"Loading settings"提示下方查看。
其中,0-9轴属于第1运动组,10-17轴属于第2运动组。因此,如果你的外部轴位于第二运动组,在配置文件中它对应的就是第10轴。