发那科驱动器
你可以在RoboDK 和发那科(Fanuc)机器人控制器之间建立连接,以使用RoboDK从连接的PC自动移动机器人。
这样就可以使用 RoboDK 的运行于机器人选项,进行在线编程和调试。通过以太网(TCP/IP)实现RoboDK与机器人的实时通信,支持在线编程与调试。
机器人驱动程序提供了离线编程的替代方案(生成程序,然后传输到机器人并执行)。使用机器人驱动程序,可以直接在机器人上运行模拟程序(在线编程)。更多信息请参阅机器人驱动器。
Important:机器人控制程序运行时会占用并覆盖UTOOL 1 和UFRAME 1 寄存器,以及Registers 50,51,52 和Position Registers 50, 51, 52,建议在运行前做一次备份,避免数据丢失。
Note:这种运行模式需要 FANUC 的软件选项:用户套接字消息(User Socket Messaging)(R636 或 R648,具体取决于控制器型号),PC 接口(PC Interface)(R641)。另外,还需要 Karel 选项(R632)才能运行 PC 文件。作为替代方案,也可以使用 PCDK 选项(使用时请确保选择 FanucPCDK 驱动)。
驱动设置步骤:
1.前往RoboDK客户服务位置下载驱动文件,并传输以下程序到控制器:
a.RDK_S3.PC:这是通过 S3(插座通信端口号 3 - S3)管理通信的主程序,注意选择适配控制器版本的文件夹,如V9。
b.GO_MJ.TP
c.GO_ML.TP
d.GO_MC.TP
e.GO_PROG.TP
在示教器上配置通信参数:
1.选择 Menu-(Next)-System-[TYPE]-Variables.
a.选择:$HOSTS_CFG(按住 shift 键的同时向下选择,这样可以更快地向下滚动)
b.选择:Number 3
c.找到$hosts_cfg[3].$server_port,并设置为2000
2.选择:MENU-Setup
3.选择:[TYPE]-Host comm
4.选择:[SHOW]-Servers
5.选择:S3-Enter
a.协议名称(Protocol Name):SM
b.端口名称(Port Name):P3(或其他可用端口)
c.超时时间(Inactivity Timeout):9999
d.启动状态(Startup state):START
e.当前状态(Current state):通过 [ACTION]-DEFINE 和 [ACTION]-START 设为 STARTED。
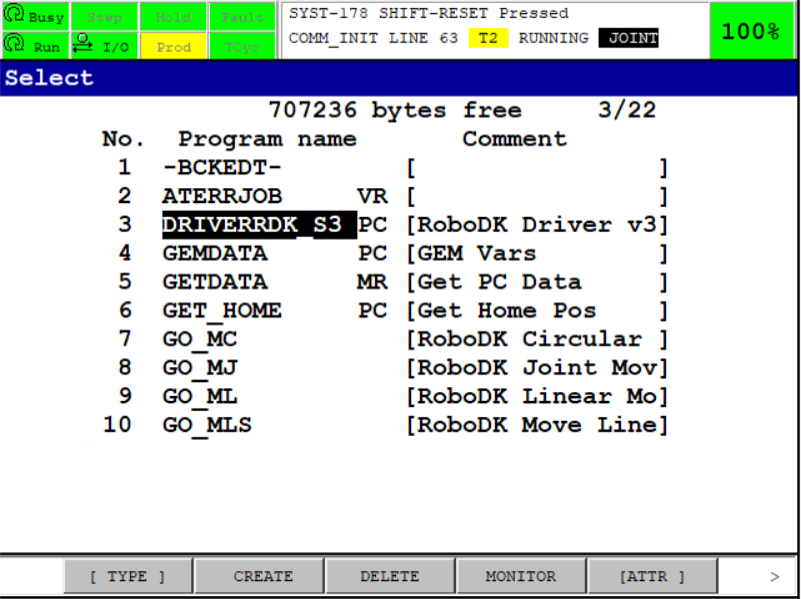
6.启动程序:RDK_S3
a.在示教器选择程序,按 Shift+Reset 和 Shift+Forward 运行。
b.若显示 RUNNING 表示成功;若显示Undefined built-in表示报错,需检查控制器选项是否激活。
Note: 如果你在第 72 行看到 "Undefined built-in"等错误信息,说明你的机器人控制器没有用户套接字信息选项。
7.在 RoboDK 中,提供机器人的 IP,然后选择:连接,以与机器人连接。
Note:若通信失败,重启 RDK_S3 并重新连接。
Note: RoboDK 和发那科(Fanuc)默认使用端口 2000。1.c 节中的端口可以不同,但在 RoboDK 中需要指定相同的端口(机器人连接菜单中的机器人端口选项)。
Important:如果程序未显示正在运行,则表示缺少控制器选项。在这种情况下,你必须联系发那科(Fanuc)以激活用户插座信息选项。
Note:必须选择并运行 RDK_S3 程序,机器人通信才能正常工作。如果 S3 寄存器不能用于机器人驱动器,您可以加载另一个使用另一个 S 寄存器的 PC 文件(如 RDK_S4)。
Note:如果你有一个位置或额外的exes,或者RoboDK 中的默认轴映射不反映真实机器人的轴映射,你可以通过编辑位于 %appdata%\RoboDK-Drivers\ FanucSM.exe.ini 的文件来修改驱动器的映射。其他相关内容,请参阅部分。
驱动高级配置
你可以通过INI文件配置驱动器的其他设置。这样你就可以配置如何映射外部轴。
首次运行驱动程序时,它会生成一个包含配置高级参数(如外部轴映射)标志的文件。该设置文件的位置可在驱动程序日志开头以"Loading settings"开头的行中找到。
Tip:如需多组配置,可复制驱动文件并重命名。
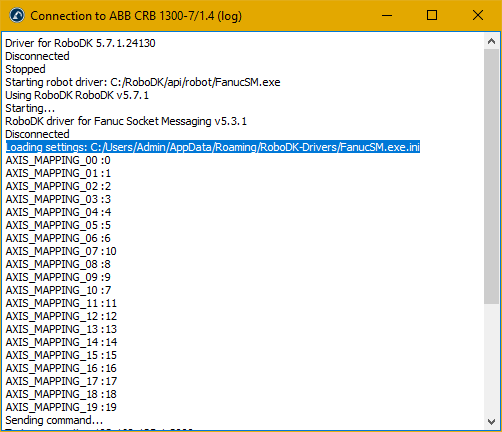
你可以使用任意文本编辑器打开此配置文件,其中列出了RoboDK中使用的各轴与发那科机器人控制器中各轴的对应关系。此外,你还可以启用额外的调试信息打印功能,以及修改要使用的运动组数量。
举例说明:若RoboDK中的第8轴对应机器人控制器的第9轴,你只需将配置文件右侧的数值修改为正确对应值即可。修改后的映射关系可以在启动信息中"Loading settings"提示下方查看。
其中,0-9轴属于第1运动组,10-17轴属于第2运动组。因此,如果你的外部轴位于第二运动组,在配置文件中它对应的就是第10轴。