更新控制器运动参数
本节介绍在使用RoboDK校准与性能包对机器人进行校准后,如何更新机器人控制器上的运动学参数(DH表)。修改控制器DH参数将影响所有在控制器上手动创建的程序。请保留原始DH参数的副本,以便需要恢复控制器出厂设置时使用。
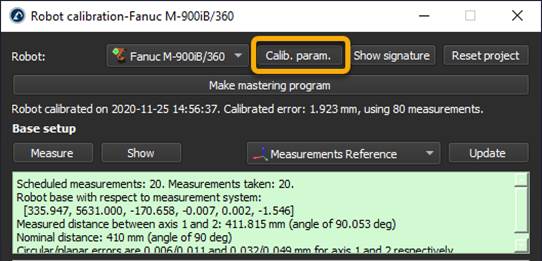
1.在校准机器人窗口点击按钮:校准参数。
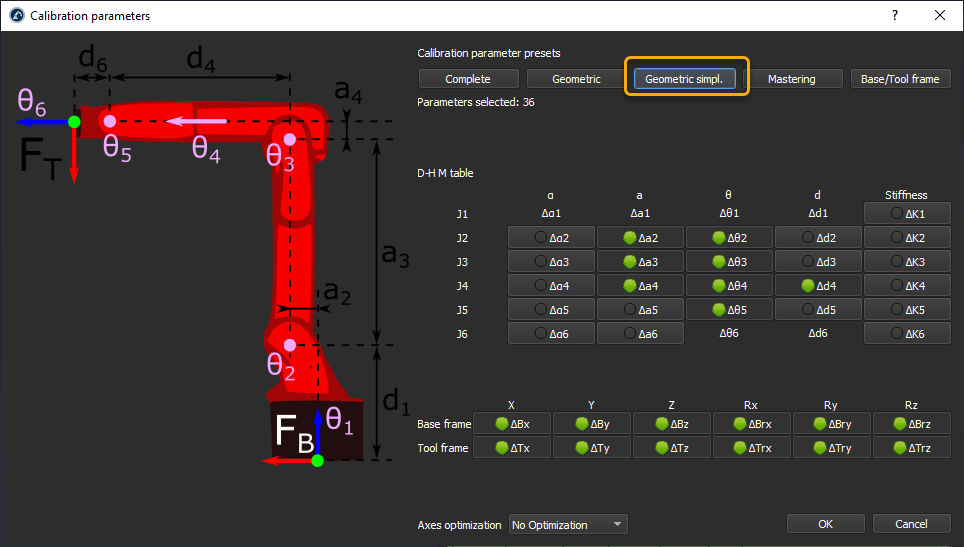
2.在校准参数窗口选择按钮:简化几何。
3.运行校准序列,或更新现有序列。

4.读取机器人校准:DH参数。在机器人面板中选择:参数。然后选择导出台面。
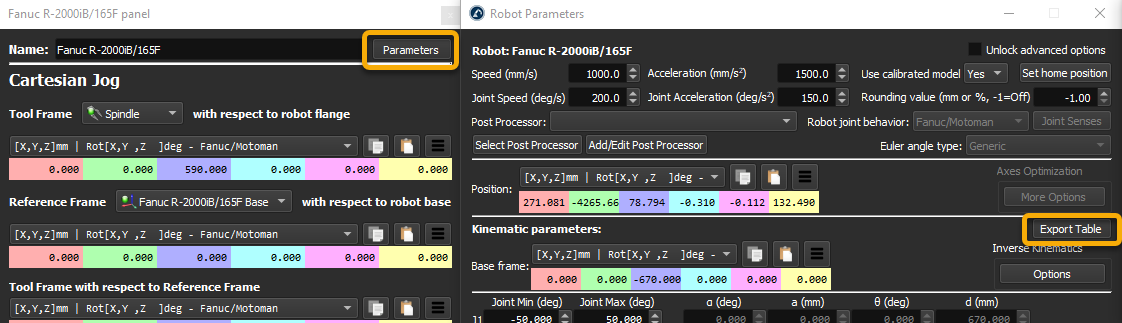
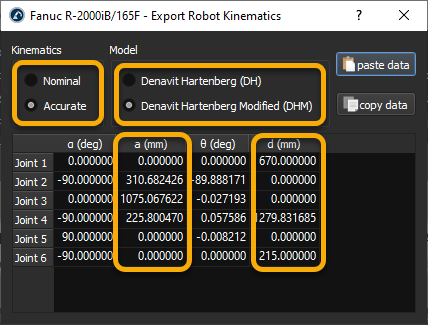
5.必须使用精确运动学模型:标称模型 仅用于与控制器默认DH参数对比,不可用于实际校准。
6.采用改进型D-H参数模型(Denavit-Hartenberg Modified):此模型可修正控制器参数,确保运动学计算与真实机械结构一致。
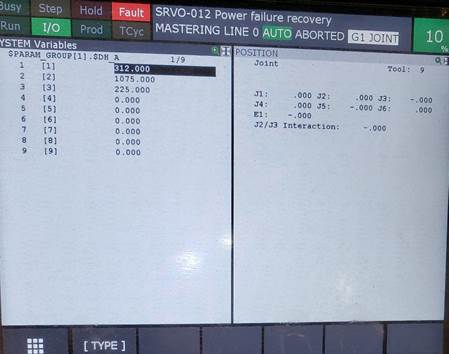
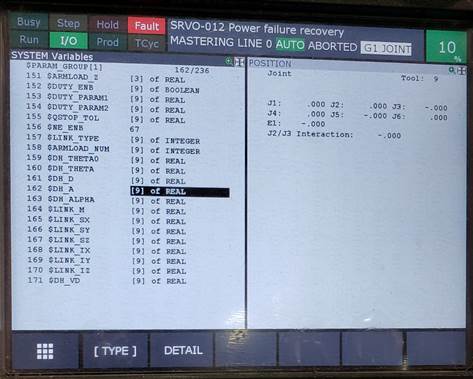
7.在示教器上操作:System variables -> $PARAM_GROUP[1]。
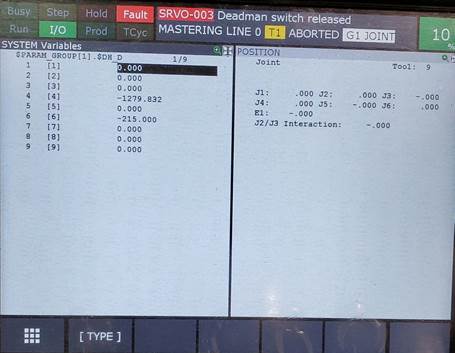
8.$DH_A(连杆长度)、$DH_D(连杆偏移量)
9.用Export Robot Kinematics窗口中的 a 和 d 值修改 DH 值修改关节DH参数