Navigation offcanvas
在发那科(Fanuc)示教器上获取机器人关节位置的步骤
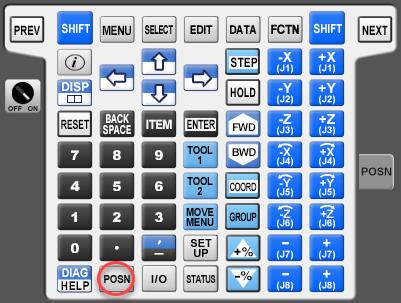
1.选择:POSN(示教器按钮),查看当前机器人位置
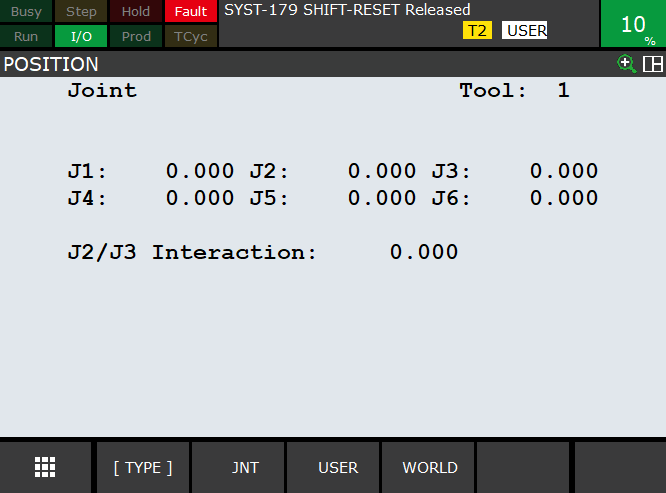
2.点击屏幕上的JNT 或按COORD键,切换到关节坐标系模式。