LS
本节将说明发那科LS与TP程序文件的区别,以及如何使用RoboDK自动为发那科机器人编译程序。
TP文件,也成为二进制文件,可以直接在发科那机器人上运行。LS文件,是ASCII文本格式(由RoboDK等离线编程软件生成),需编译为TP文件后才能执行。那么有这样两种编译方法:
1.方法1:使用机器人ASCII上传功能。前提条件是机器人控制器需启用 ASCII Upload 软件选项。操作步骤,先将LS文件复制到机器人 FR磁盘,在示教器上选择 LOAD,系统会自动将其转换为TP文件。
2.方法2:使用Roboguide中的WinOLPC工具编译程序。在这种情况下,安装有RoboDK的同一台计算机可以使用Fanuc的“maketp.exe”编译器工具自动编译LS程序。此命令需要一个«robot.ini»文件。如果已安装Roboguide并在计算机上保存了工作站(“Work Cell”),则可以使用WinOLPC中的setrobot.exe实用程序生成此文件。
若WinOLPC安装在默认路径(C:\Program Files (x86)\FANUC\WinOLPC\bin),RoboDK会在生成LS文件后 自动调用maketp.exe编译为TP文件。
确保使用 setrobot 可执行文件选择了机器人。如果未生成 TP 文件,且已安装 Roboguide WinOLPC,则可能需要执行以下步骤:
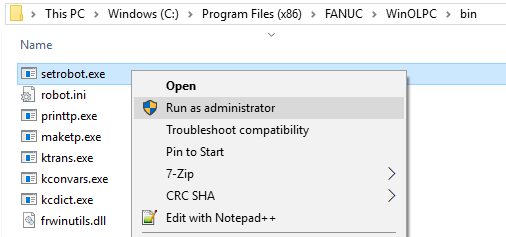
1.打开Windows资源管理器,导航至WinOLPC安装文件夹:
C:\Program Files (x86)\FANUC\WinOLPC\bin
2.右键点击setrobot.exe文件,选择“以管理员身份运行”
3.选择机器人工作单元(需要Roboguide工作单元)
或者,也可以从默认文件夹中复制以下文件夹的内容:
C:\Program Files (x86)\FANUC\WinOLPC\bin
到文件夹:
C:\RoboDK\api\Fanuc
Note:最好遵循编译器的版本要求,但并非强制。只要虚拟WorkCell机器人和实际机器人的轴数相同且选项配置一致,编译应该可以顺利进行。一旦你有了robot.ini文件,每次更改机器人时就可以直接使用maketp.exe,而不必每次都运行setrobot.exe。
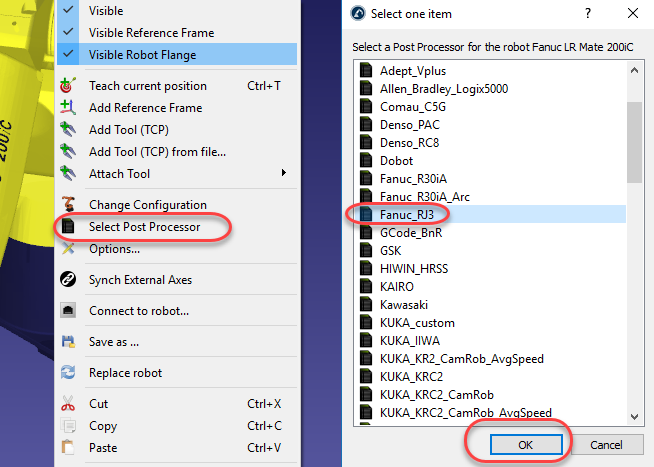
请按照以下步骤选择与发那科(Fanuc)RJ3 控制器兼容的后处理器:
1.右键点击机器人
2.点击:选择后处理程序
3.选择:Fanuc RJ3
4.生成程序 (F6)
Tip:更多信息请参阅后处理器章节。
如果您没有在默认位置安装Roboguide WinOLPC,并且希望在从RoboDK生成程序时自动获取TP文件,请按照以下步骤操作:
1.在菜单栏选择:程序➔ 添加/编辑后处理器
2.选择:Fanuc RJ3(或你想使用的后处理器)。也可通过文件夹访问所有后处理器:C:/RoboDK/Posts/。此外,请确保你使用的不是编译后处理器。
3.找到变量:PATH_MAKE_TP(第 103 行左右),并输入 maketp 可执行文件所在的路径。
用于发那科(Fanuc)机器人的 RoboDK 后处理器支持使用与转台或线性轴等外轴同步的 6 轴机器人。
Note:有关自定义后处理器的更多信息,请参阅后处理器章节。