传输机器人程序
在USB 驱动器中加载程序的步骤:
1.首先,将USB 驱动器插件插在示教器上
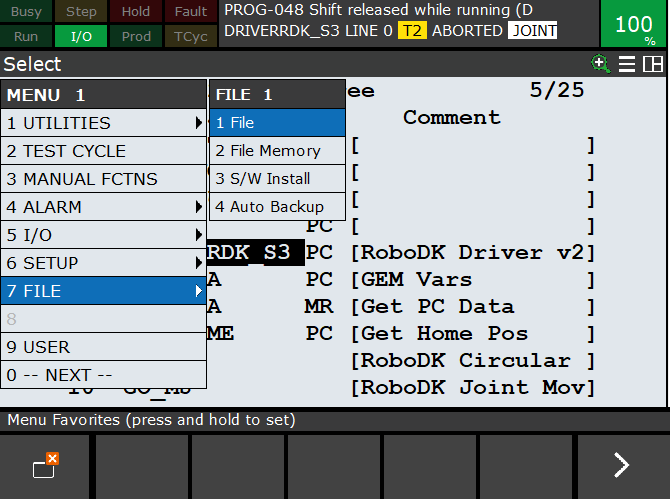
2.选择:Menu➔File
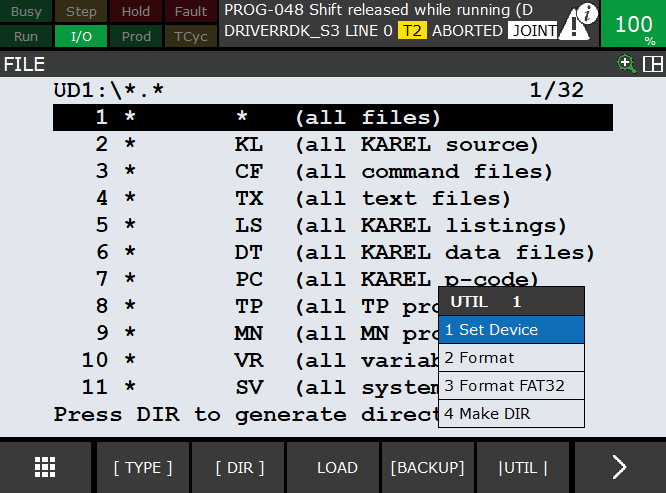
3.选择:Utilities➔Set device➔USB
4.选择:DIR
5.在USB磁盘中选择TP 或 LS 程序文件(例如BALLBARTEST.TP)
这将自动把文件保存到控制器的FR 内存中
6.选择FR存储器中的程序并选择LOAD(屏幕按钮)
Important:离线编程需要使用ASCII上传选项。这样可以直接将LS文件加载到控制器中。另外,也可以使用发科那(Fanuc)的WinOLPC工具(MakeTP)将LS程序(ASCII文件)从PC编译为TP程序(二进制文件)。
Important:默认情况下,使用RoboDK创建的程序其线速度由寄存器R[10]定义。如果程序中没有设置速度,则必须手动设置。那么这样操作:
选择: DATA➔Type➔Register,R[10]=50(表示速度为50毫米/秒)