大族(Han's)机器人
本节文档概述了在 RoboDK 中编写程序,将其传输到大族(Han's)机器人的常用操作
传输机器人程序
你可以将 RoboDK 生成的机器人程序手动导入大族(Han's)的机器人控制器。
导入步骤:
1.启动大族(Han's)的控制器,并连接机器人。
2.在 RoboDK 中,右键单击要导入的程序点击:生成机器人程序....
3.RoboDK会提示你保存两个文件,一个是将发送到控制器的命令的逐行脚本,另一个是要上传到控制器的 .json 文件。
4.选择要保存每个文件的位置:.json 文件可保存到 USB 盘中,以便作为程序导入控制器。
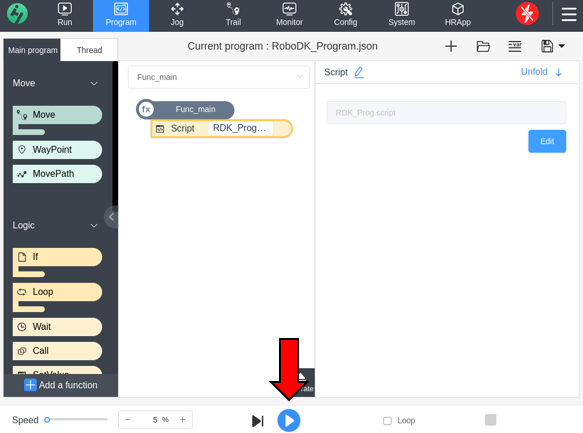
5.在控制器中,导航至程序选项卡。
6.当前程序名称右侧有一个文件夹图标。选择该图标可打开程序文件列表。
7.选择列表底部的按钮:Import。

8.找到RoboDK在USB上生成的.json文件并选择它。
9.点击:Apply,启用导入的程序。

10.RoboDK程序将作为调用脚本的函数导入。
11.选择蓝色启动按钮,即可开始在机器人上运行程序。