机器人驱动器
机器人驱动器为离线编程提供了另一种选择。使用Hanwha驱动器,你可以在仿真程序(在线编程)时直接在RoboDK上操控机器人的移动。更多信息详见机器人驱动器章节。
请按照以下步骤配置 RoboDK,以便与韩华机器人配合使用。
步骤 1.设置机器人 IP 地址
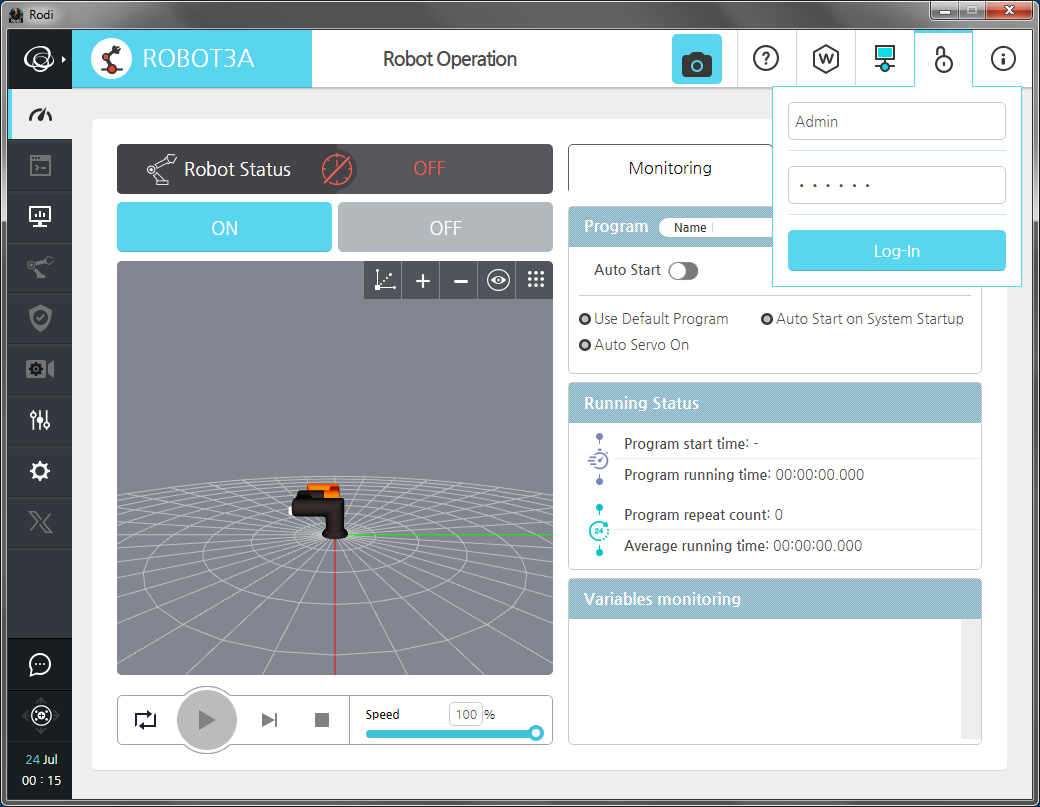
1.以管理员登录控制器
Note:默认账号:用户名 Admin,密码 170502。或用户名 user,密码 hcr5(默认拥有管理员权限)。
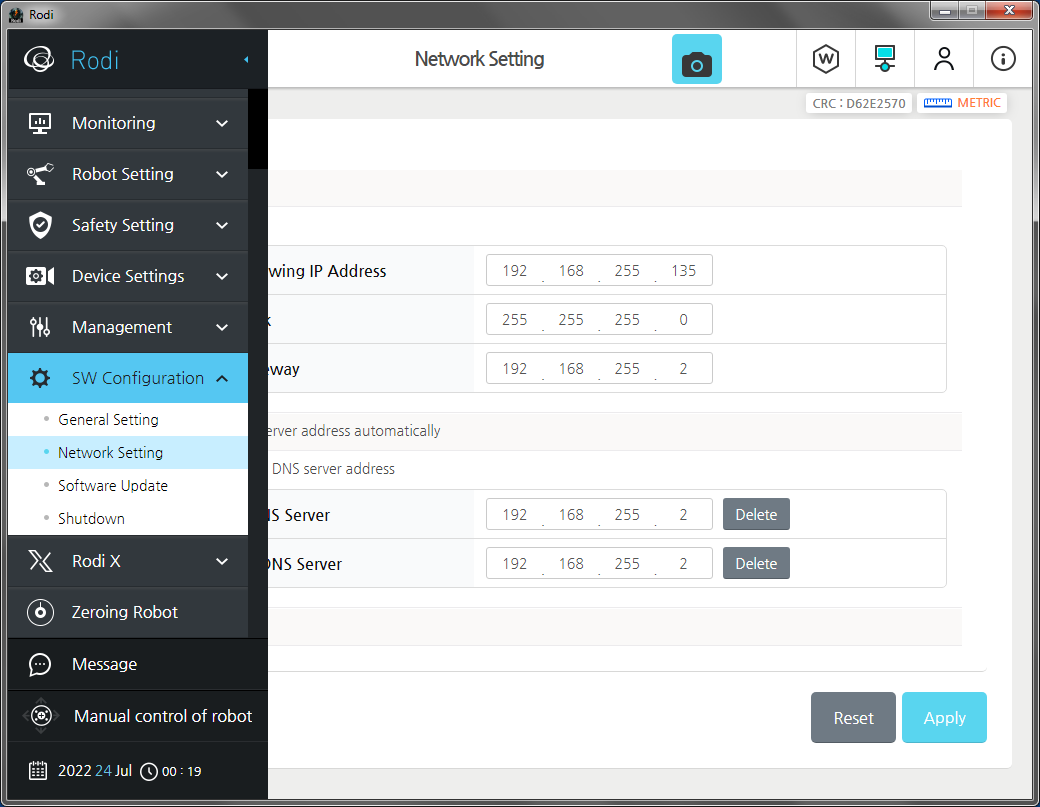
2.进入 SW Configuration → Network Setting:
a.填写本地网络参数(IP地址、子网掩码等)
b.点击:Apply,按提示重启控制器
步骤 2.安装 RoboDK 连接器插件
1.保持管理员登录状态
2.将存有 RoboDK.asar 文件的U盘插入控制器或示教器
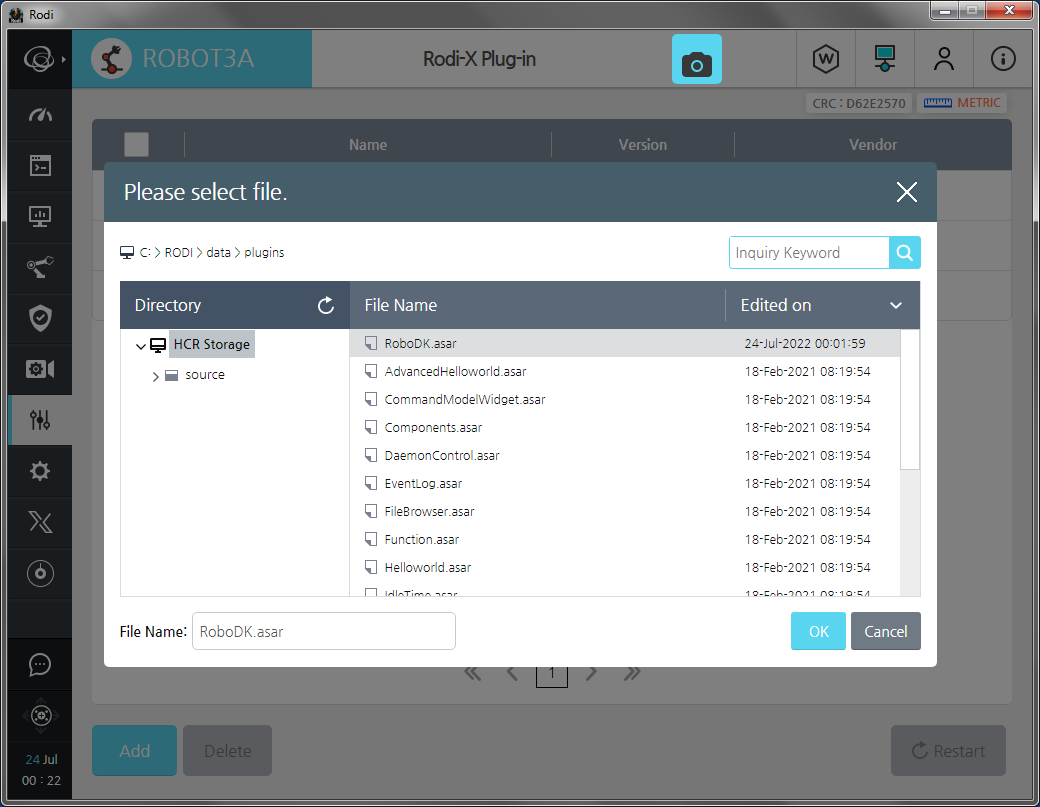
3.打开 Management → Rodi-X Plug-in:点击按钮:add
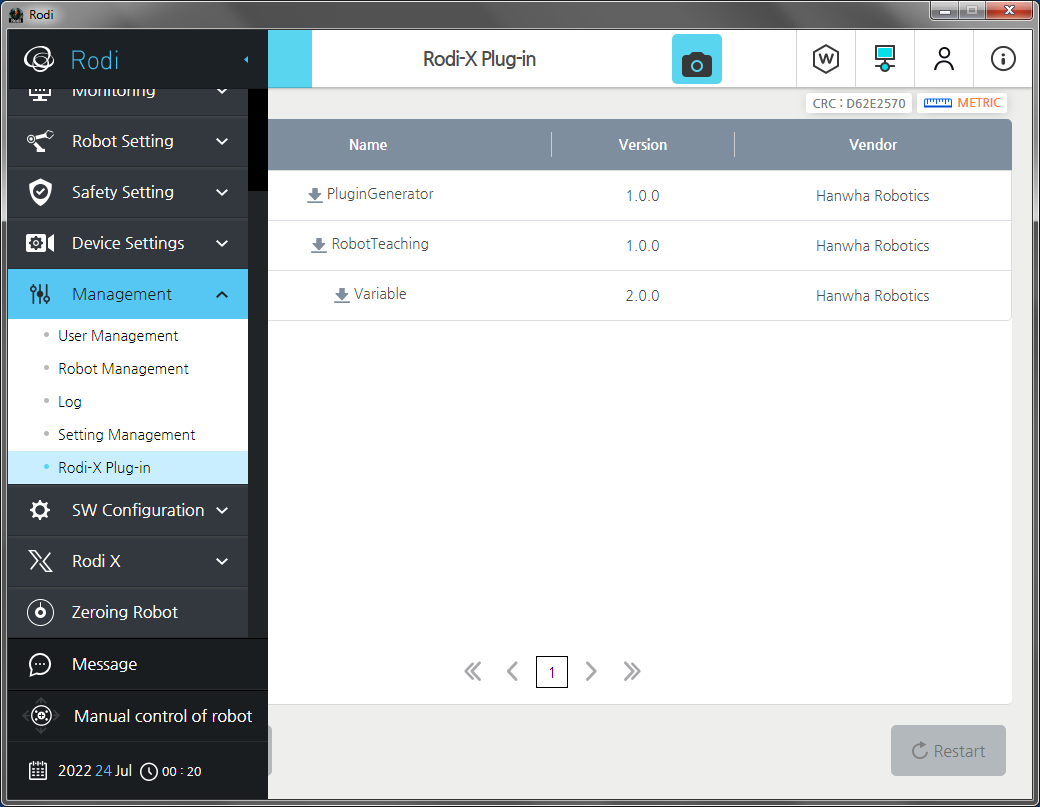
4.选择RoboDK.asar,然后点击ok。
5.点击 Restart 重启服务
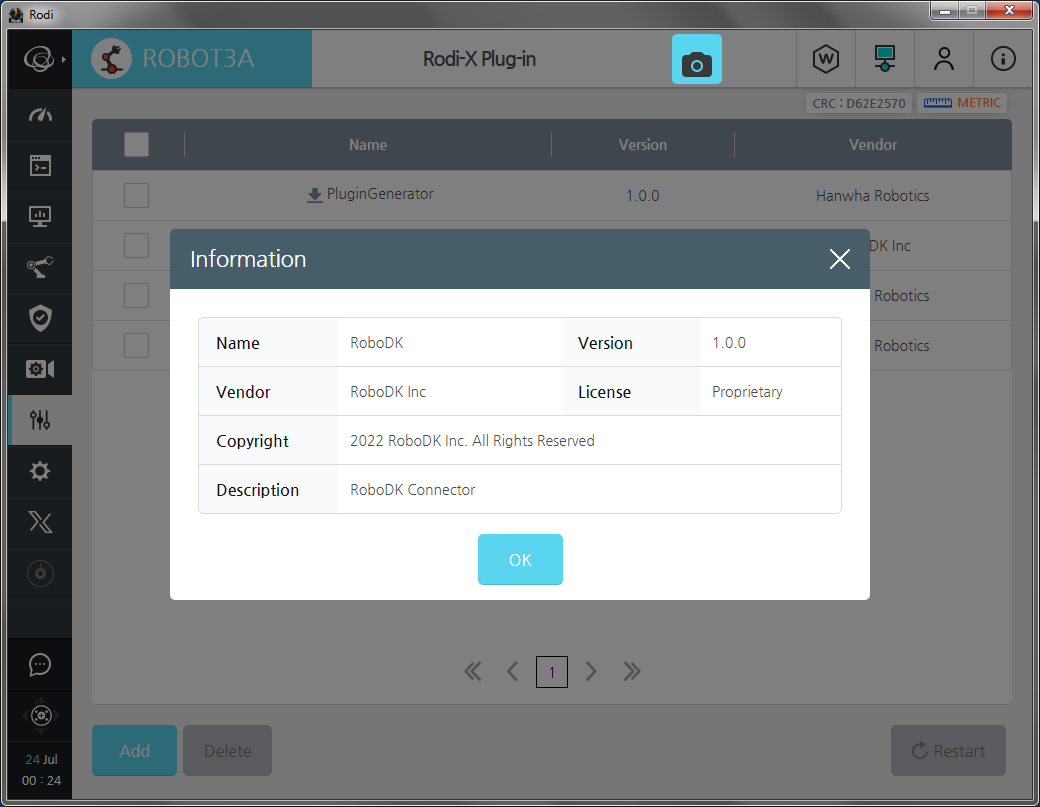
6.重新加载后,你将能看到插件的相关信息。
7.重启后进入 Rodi X → RoboDK:
a.检查 Server Status 无报错
b.若端口7000被占用,可在 Communication Port 修改端口号,并点击: Apply
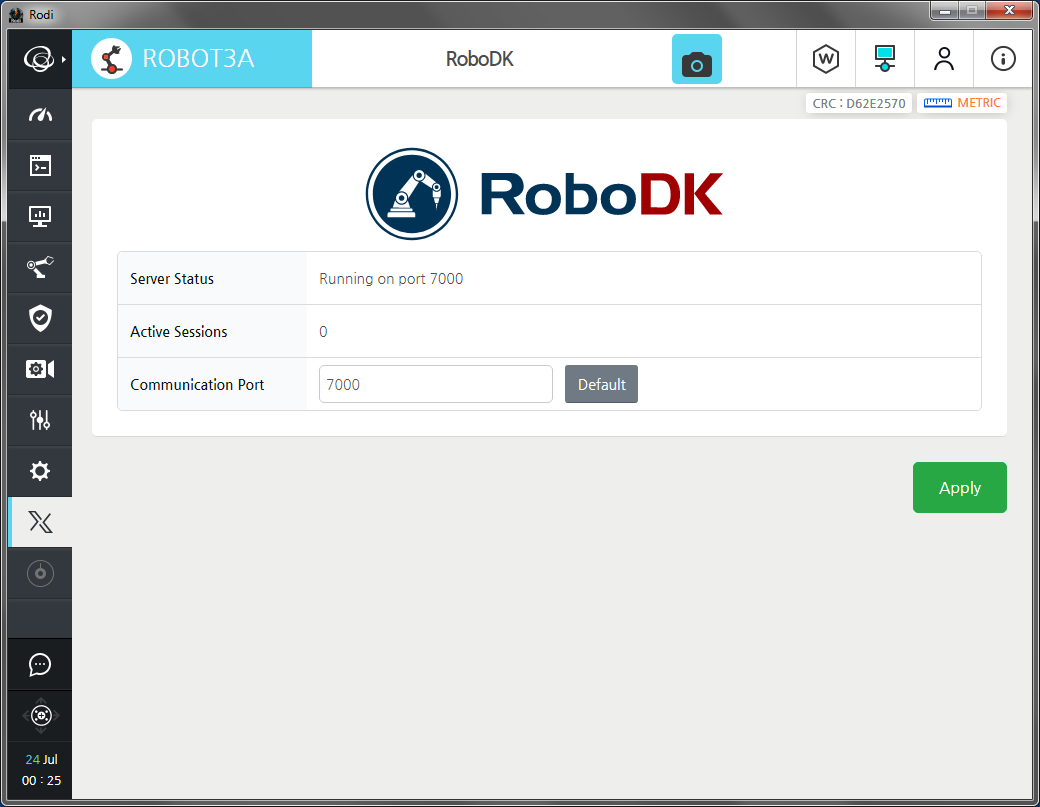
8.现在,机器人可以进行远程控制了。
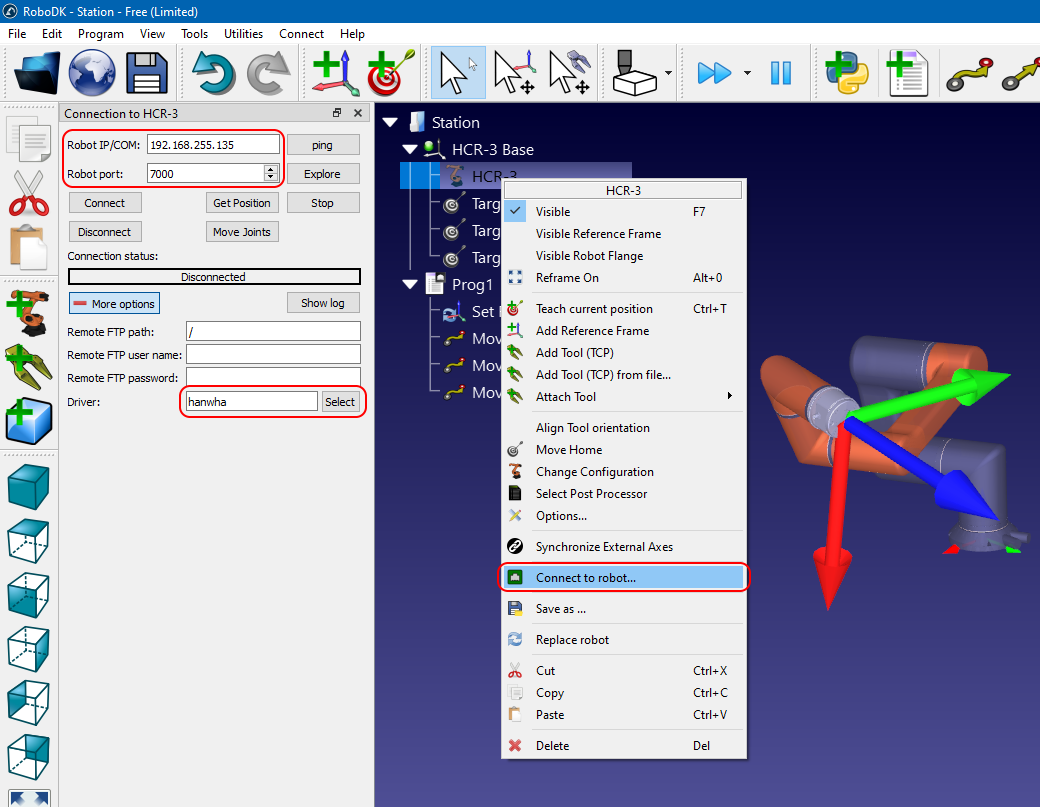
步骤 3.配置 RoboDK 连接
1.在RoboDK项目中添加韩华机器人模型(如 HCR-3)
2.右键点击机器人选择:连接到机器人...
3.在连接机器人窗口中填写:
a.Robot IP/COM:机器人控制器IP地址
b.Robot port:插件中设置的端口号(默认7000)
4.点击:更多选项,在 Driver 栏输入 Hanwha(或从列表选择对应驱动)
5.点击:连接,状态栏显示 Ready 即表示连接成功
Tip:安全提示:测试时可使用按钮:获取位置;点击按钮:关节运动前务必确认伺服已使能,机器人将立即运动至目标位置!