节卡
RoboDK和节卡(Jaka)机器人之间可建立连接,以便通过连接的电脑使用 RoboDK 自动移动机器人。这样就可以使用RoboDK的功能:在机器人上运行,完成在线编程和调试。可通过以太网连接(TCP/IP)建立连接。
Important:运行节卡驱动器需要在电脑上安装Visual Studio 2013 的 Visual C++ Redistributable Packages。你可以在Microsoft 下载并安装。
设置用于节卡(Jaka)在线编程RoboDK驱动程序步骤:
1.打开JAKA Zu APP,在JAKA Zu程序中连接机器人。
3.打开并启用节卡机器人。
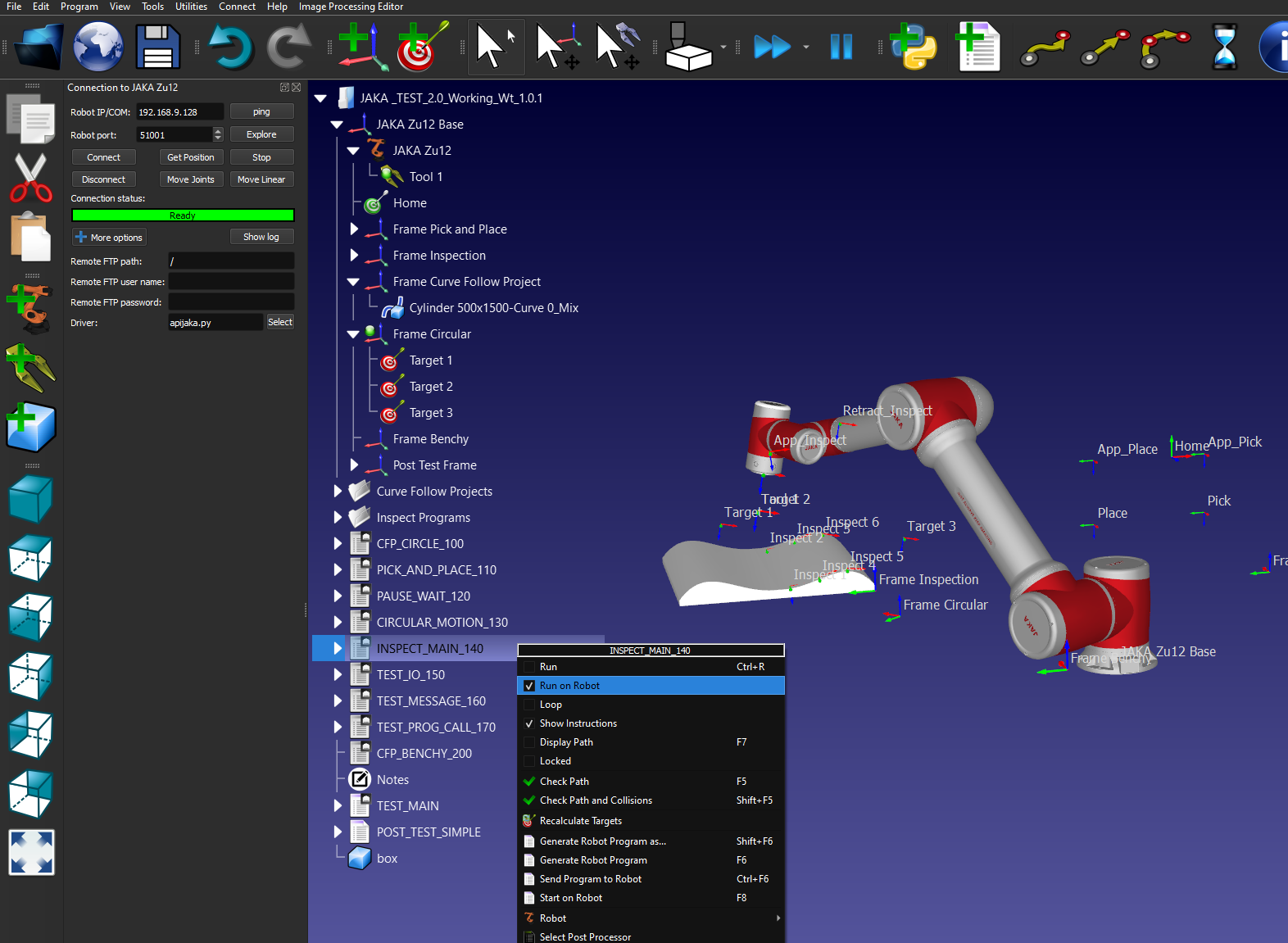
4.在RoboDK工具栏中选择:连接➔连接机器人。
5.在连接机器人窗口找到按钮:更多选项,选择节卡(Jaka)驱动器:apijaka.py。
6.填写机器人IP和端口,点击:连接。
7.现在,你可以直接在RoboDK 操作移动节卡(Jaka)机器人。
a.要在 RoboDK 中将机器人移动到目标位置,可双击工作站树中的目标,然后在连接界面中选择:关节运动,以实现机器人的关节移动。
b.要使用驱动器在机器人上运行程序,请在所需程序上单击右键,选择 "在机器人上运行 "选项。然后,双击程序即可在机器人上运行。