手动替换机器人参考坐标系
以下步骤展示了如何在JAKA Zu中手动配置机器人参考坐标系。
首先,创建一个自定义的节卡坐标系:
1.在JAKA Zu中,导航至:Settings ➔ Operation Settings ➔ User Coordinate System。
2.单击编辑按钮,为自定义坐标系设置: X、Y、Z、RX、RY 和 RZ 值。
3.选择确认,将坐标系保存到JAKA Zu中。
然后,将导入的坐标系替换为节卡(JAKA)坐标系:
4.参考本章第一节的步骤:通过RoboDK发送程序。
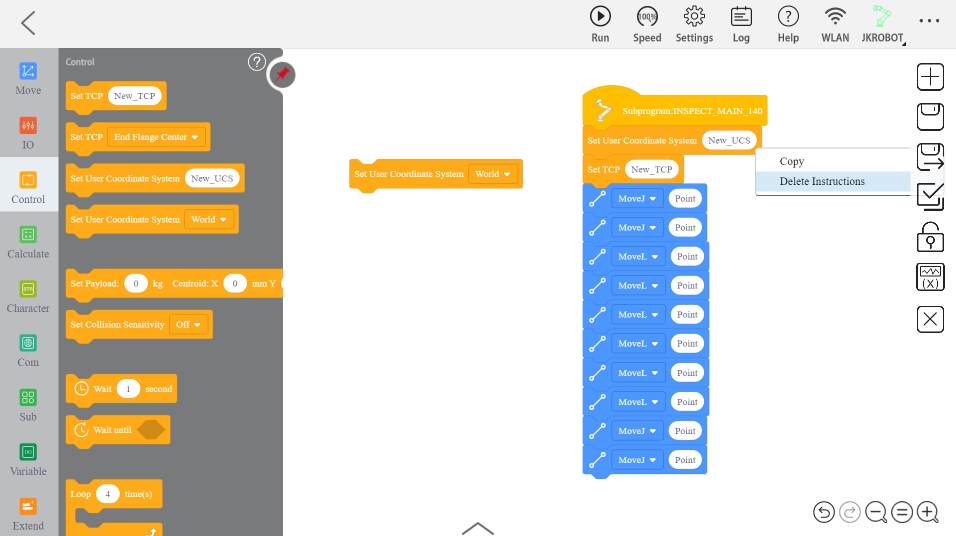
5.打开侧边栏的选项卡:Control,找到包含下拉框的图块:Set User Coordinate System。
6.右键点击自动导入的图块:New_UCS,并选择删除。
7.将移除的图块替换为“Set User Coordinate System”图块,并从下拉菜单中选择自定义框架。