发送程序
你只需点击几下RoboDK上的仿真程序,就能将程序发送到节卡(Jaka)机器人控制器。
你应按照以下步骤将程序从RoboDK 载入JAKA Zu:
1.打开JAKA Zu APP,在JAKA Zu程序中连接机器人。
2.打开并启用节卡(JAKA)机器人。
3.在RoboDK 工具栏中,选择连接➔连接机器人。
在更多选项下,确保选择了节卡(JAKA)驱动器:apijaka.py。
4.在 RoboDK 中使用机器人 IP 和端口连接机器人。
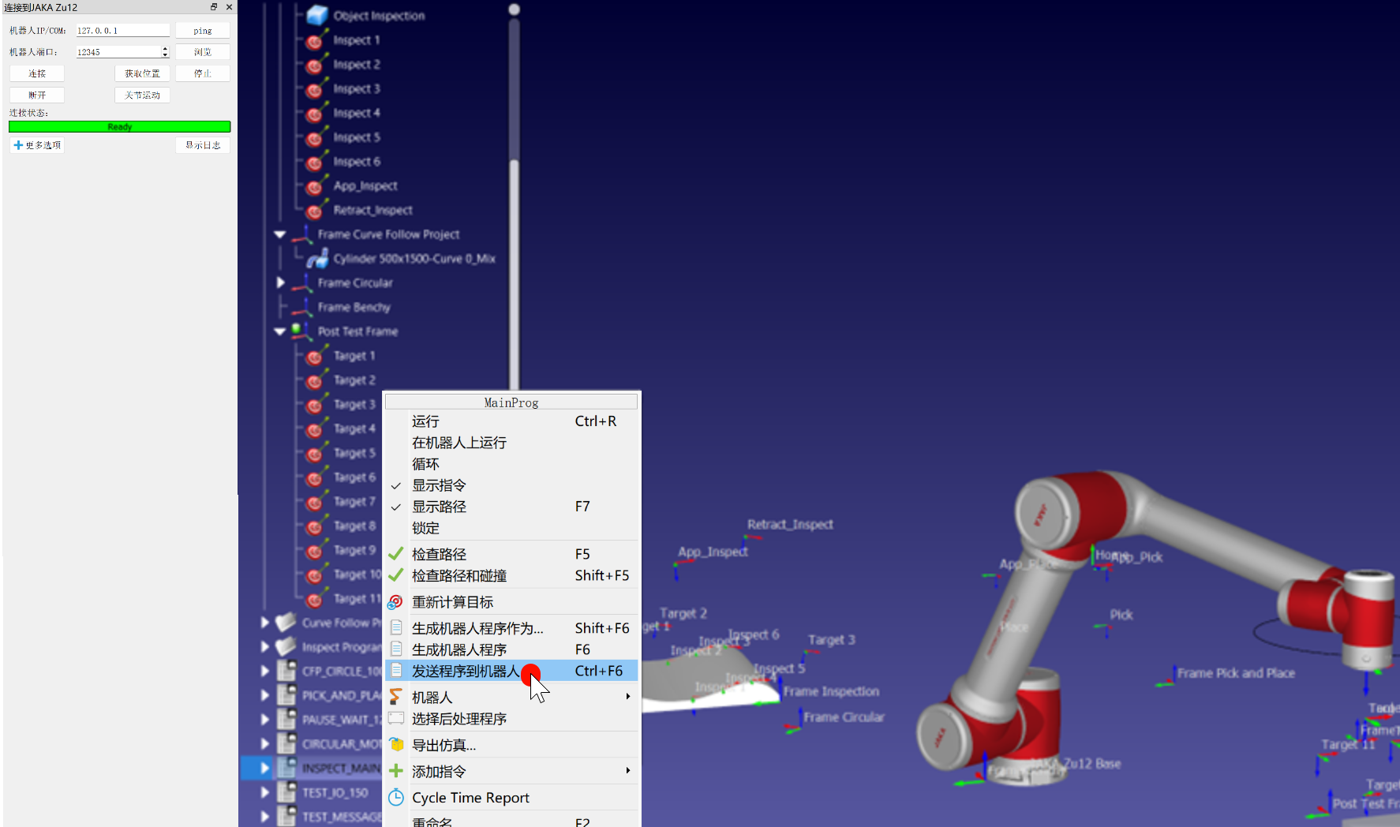
5.右键单击要发送到JAKA Zu的程序,然后选择 "发送程序到机器人"。
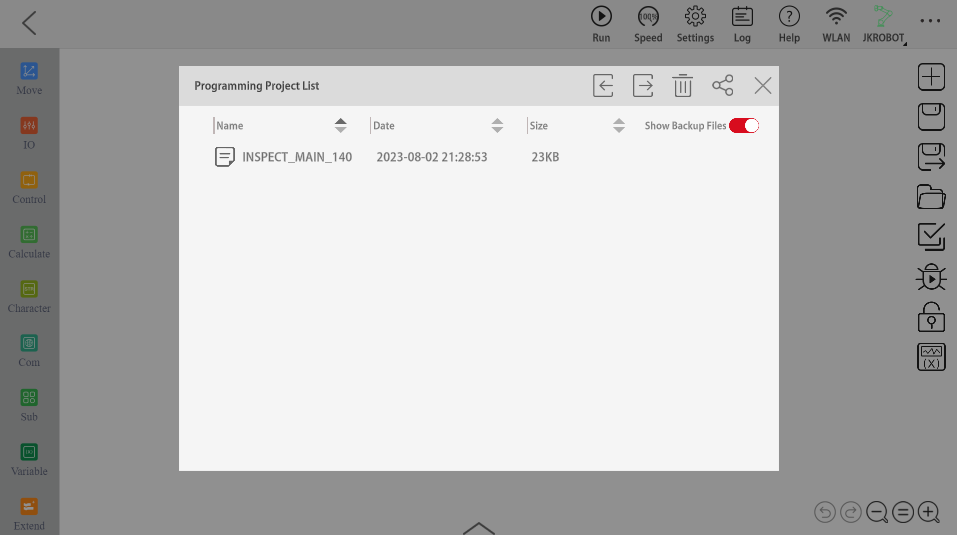
6.在AKA Zu中,导航至 "程序控制 "选项卡。
7.点击文件夹图标打开编程项目列表,选择导入的程序。
Important:每次只能上传一个程序。若你的程序里包含子程序,请确保在 RoboDK工具栏中的:工具➔选项➔程序选项卡,启用了该选项:内联子程序。