节卡(JAKA)机器人
本节文档将介绍如何使用RoboDK软件向JAKA机器人控制器应用程序发送程序的典型操作流程。
可用功能包括
1.使用驱动程序和“在机器人上运行”功能,实时操控机器人。
2.通过后处理器和“发送程序到机器人”功能将程序发送至JAKA Zu应用,或通过导入RoboDK生成的.zip文件手动将程序加载到JAKA Zu中。
发送程序
你只需点击几下RoboDK上的仿真程序,就能将程序发送到节卡(Jaka)机器人控制器。
你应按照以下步骤将程序从RoboDK 载入JAKA Zu:
1.打开JAKA Zu APP,在JAKA Zu程序中连接机器人。
2.打开并启用节卡(JAKA)机器人。
3.在RoboDK 工具栏中,选择连接➔连接机器人。
在更多选项下,确保选择了节卡(JAKA)驱动器:apijaka.py。
4.在 RoboDK 中使用机器人 IP 和端口连接机器人。
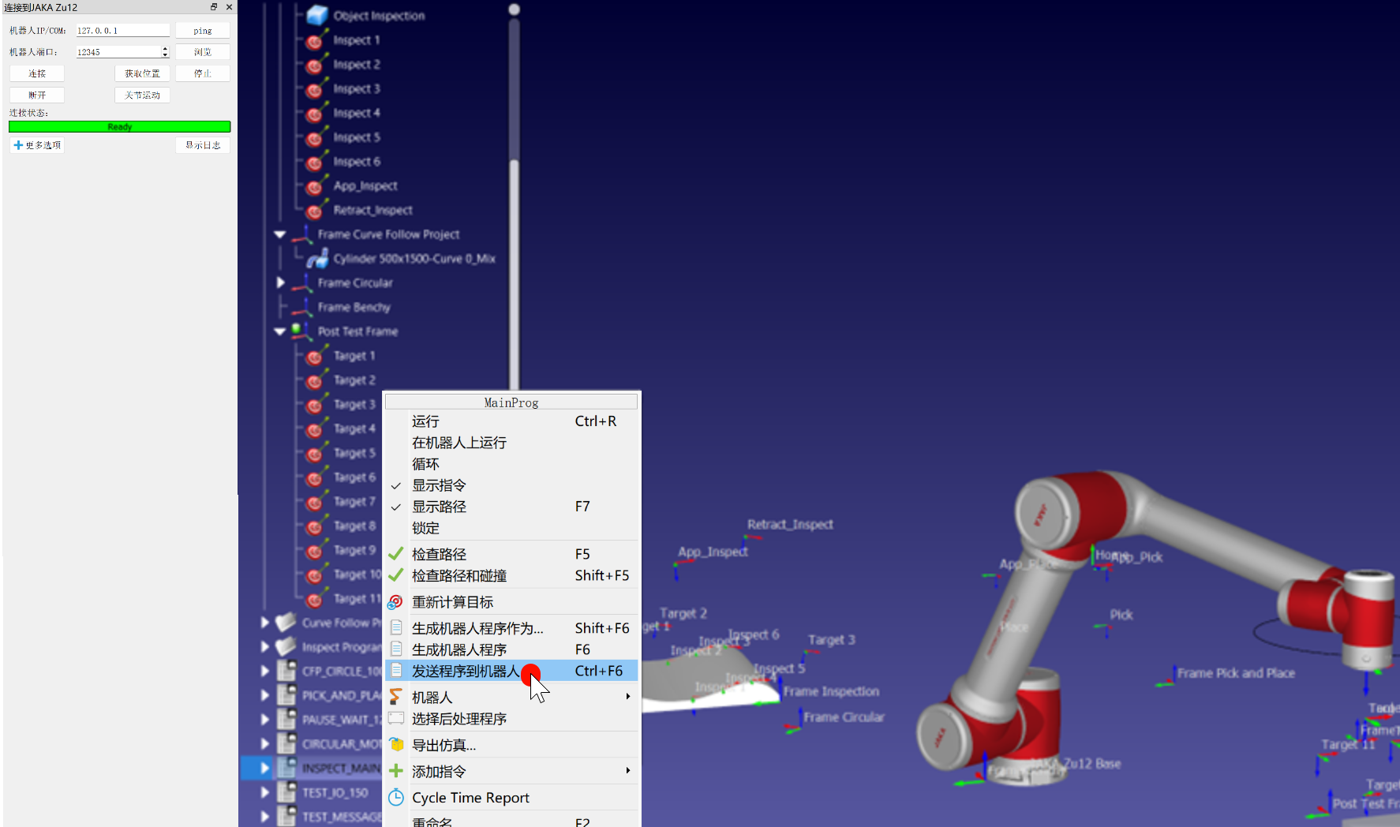
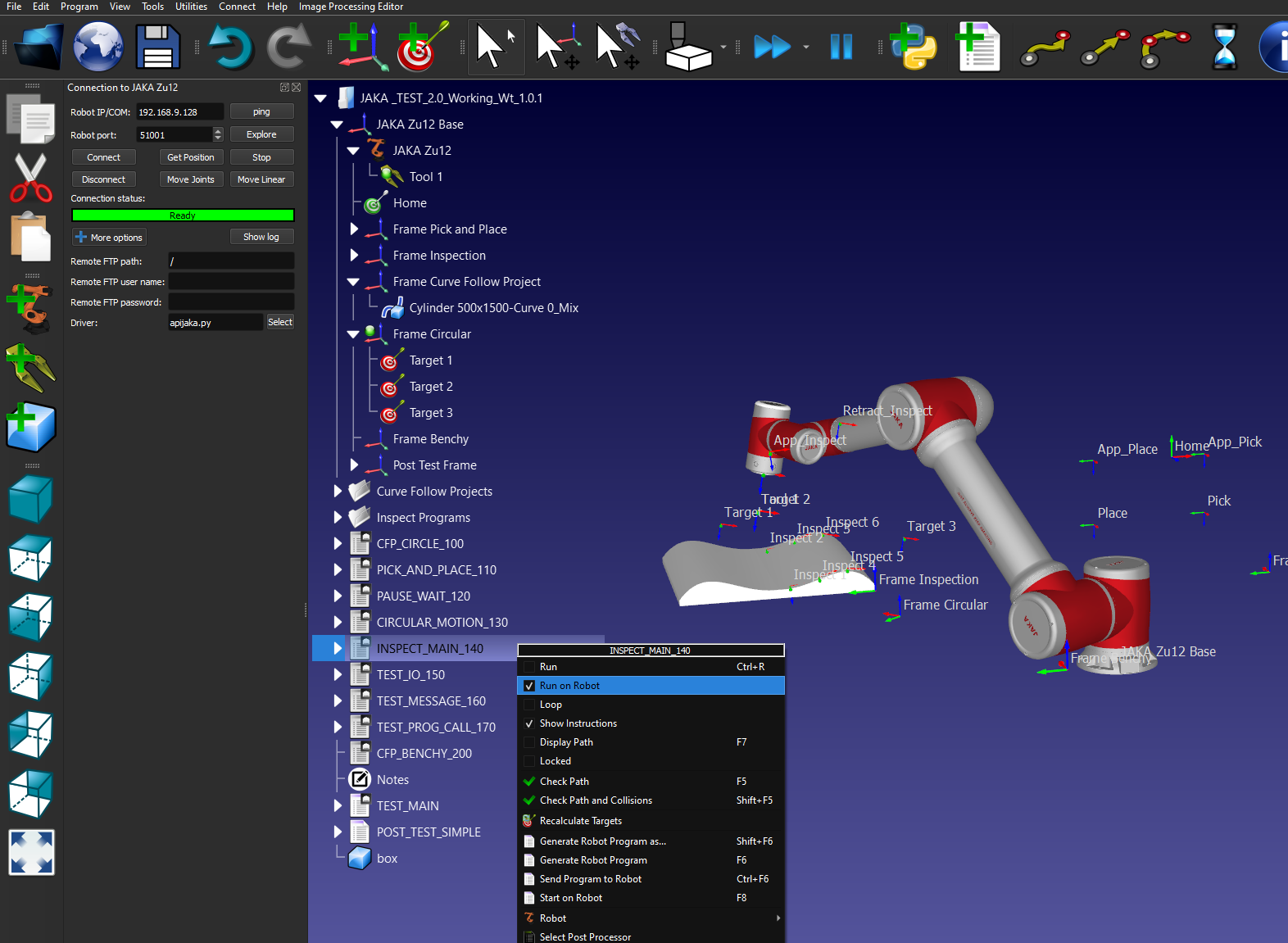
5.右键单击要发送到JAKA Zu的程序,然后选择 "发送程序到机器人"。
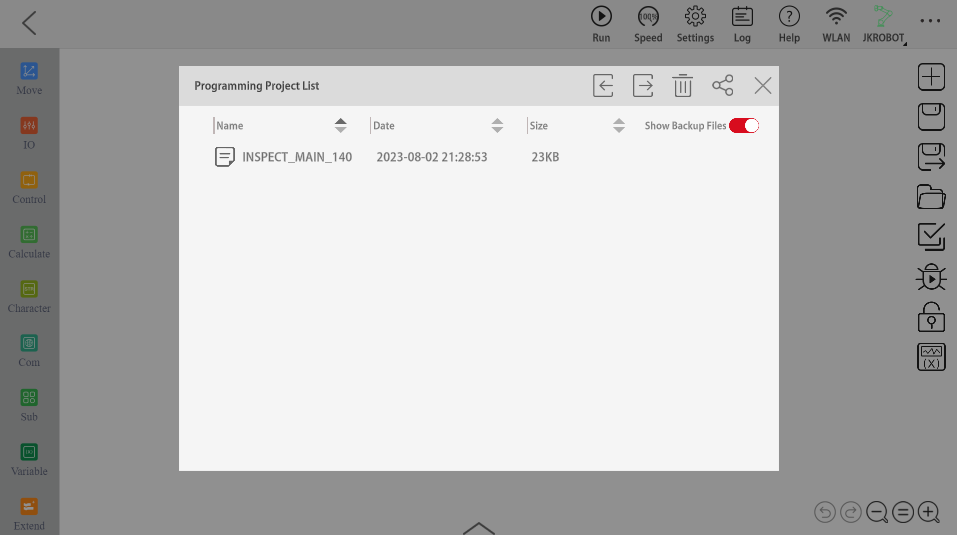
6.在AKA Zu中,导航至 "程序控制 "选项卡。
7.点击文件夹图标打开编程项目列表,选择导入的程序。
Important:每次只能上传一个程序。若你的程序里包含子程序,请确保在 RoboDK工具栏中的:工具➔选项➔程序选项卡,启用了该选项:内联子程序。
手动导入程序到控制器
你可以将RoboDK 生成的机器人程序手动导入节卡(Jaka)机器人控制器。
你应按照以下步骤将 RoboDK 程序导入JAKA Zu:
1.打开JAKA Zu,在JAKA Zu 程序中连接机器人。
2.打开并启用节卡机器人。
3.右键单击要导入到节卡的程序,然后选择:生成机器人程序作为....
4.选择你希望保存程序的位置。
5.在JAKA Zu中,导航至选项卡:Programming Control。
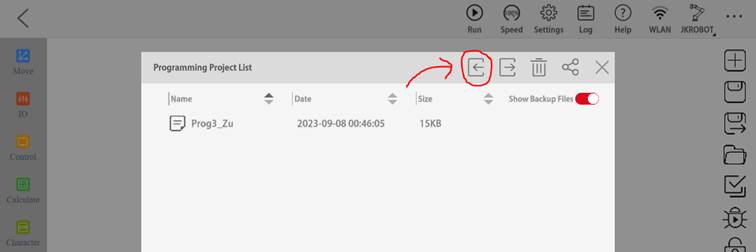
6.点击文件夹图标打开程序项目列表,然后点击导入图标。
7.找到并选择 RoboDK 生成的 .zip 文件。
8.打开编程项目列表,选择导入的程序。
手动替换机器人参考坐标系
以下步骤展示了如何在JAKA Zu中手动配置机器人参考坐标系。
首先,创建一个自定义的节卡坐标系:
1.在JAKA Zu中,导航至:Settings ➔ Operation Settings ➔ User Coordinate System。
2.单击编辑按钮,为自定义坐标系设置: X、Y、Z、RX、RY 和 RZ 值。
3.选择确认,将坐标系保存到JAKA Zu中。
然后,将导入的坐标系替换为节卡(JAKA)坐标系:
4.参考本章第一节的步骤:通过RoboDK发送程序。
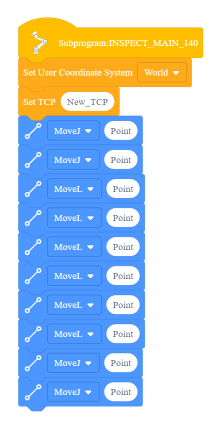
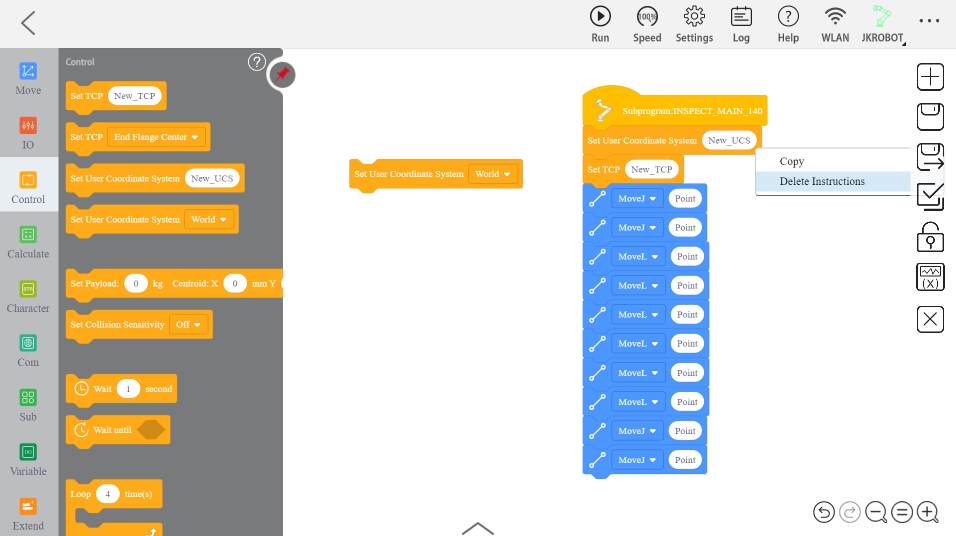
5.打开侧边栏的选项卡:Control,找到包含下拉框的图块:Set User Coordinate System。
6.右键点击自动导入的图块:New_UCS,并选择删除。
7.将移除的图块替换为“Set User Coordinate System”图块,并从下拉菜单中选择自定义框架。
手动更换机器人工具(TCP)
你也可以在JAKA Zu中手动配置TCP。以下步骤描述了这一过程。
首先,你应该创建一个自定义的工具:
1.在JAKA Zu中,导航至:Settings ➔ Operation Settings ➔ User Coordinate System。
2.单击编辑按钮,为自定义坐标系设置: X、Y、Z、RX、RY 和 RZ 值。
3.选择确认,将坐标系保存到JAKA Zu中。
然后,应将导入的工具替换为节卡(Jaka)工具:
4.参考本章第一节的步骤:通过RoboDK发送程序。
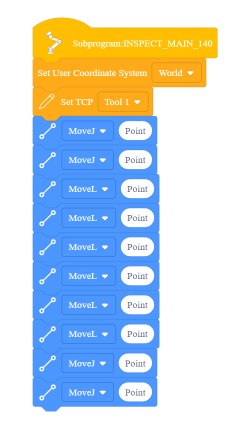
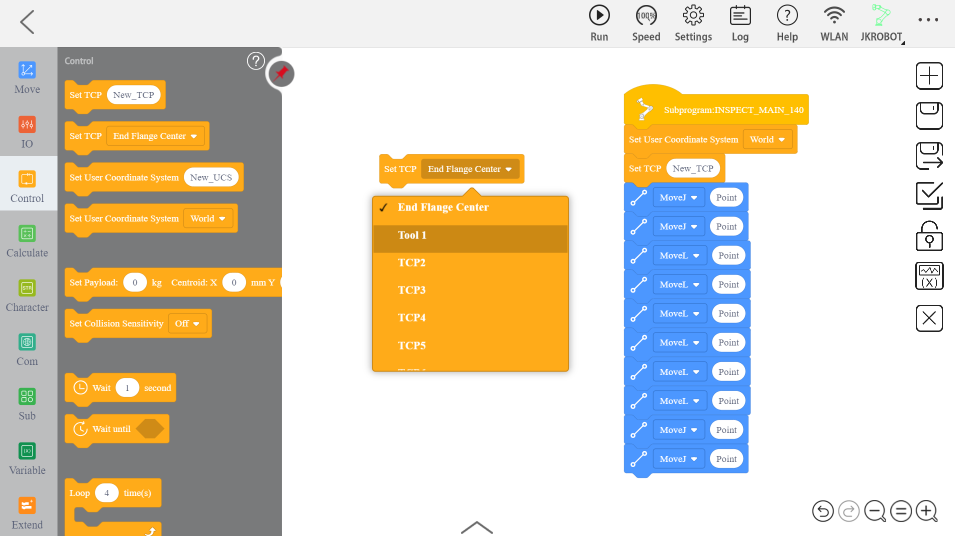
5.打开侧边栏的选项卡:Control,找到包含下拉框的图块:Set TCP。
6.右键点击自动导入的图块:New_TCP,并选择删除。
7.将移除的图块替换为图块:New_TCP,并从下拉菜单中选择自定义框架。
8.从下拉菜单中选择所需的工具。
运行机器人程序
在节卡(JAKA)机器人上启动机器人程序。
1.参考本章第一节的步骤:通过RoboDK发送程序。
2.在顶部工具栏中选择:Run。
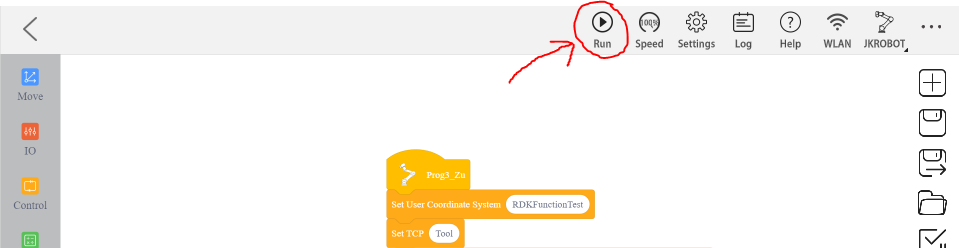
Note:在启动程序之前,可能需要先将机器人移动到JAKA Zu的初始位置。为此,请在按钮"Move to the Point by MoveJ"按住左键,直至机器人到达初始点。确认后,再次运行程序。。
节卡RoboDK驱动器
RoboDK和节卡(Jaka)机器人之间可建立连接,以便通过连接的电脑使用 RoboDK 自动移动机器人。这样就可以使用RoboDK的功能:在机器人上运行,完成在线编程和调试。可通过以太网连接(TCP/IP)建立连接。
Important:运行节卡驱动器需要在电脑上安装Visual Studio 2013 的 Visual C++ Redistributable Packages。你可以在Microsoft 下载并安装。
设置用于节卡(Jaka)在线编程RoboDK驱动程序步骤:
1.打开JAKA Zu APP,在JAKA Zu程序中连接机器人。
3.打开并启用节卡机器人。
4.在RoboDK工具栏中选择:连接➔连接机器人。
5.在连接机器人窗口找到按钮:更多选项,选择节卡(Jaka)驱动器:apijaka.py。
6.填写机器人IP和端口,点击:连接。
7.现在,你可以直接在RoboDK 操作移动节卡(Jaka)机器人。
a.要在 RoboDK 中将机器人移动到目标位置,可双击工作站树中的目标,然后在连接界面中选择:关节运动,以实现机器人的关节移动。
b.要使用驱动器在机器人上运行程序,请在所需程序上单击右键,选择 "在机器人上运行 "选项。然后,双击程序即可在机器人上运行。
获取机器人IP地址
要从JAKA虚拟机获取IP地址,需要解码下图所示机器人地址字段的Base64字符串:
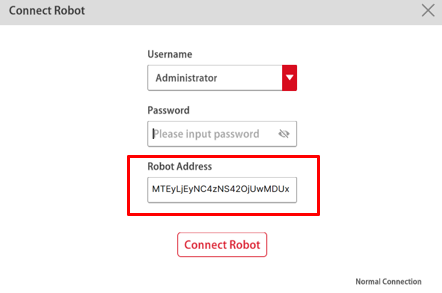
你可以通过这个解码工具:https://www.base64decode.net/ ,它能提供机器人IP和端口。


在本例中,IP:112.124.35.6,端口:50051。