控制器驱动
机器人驱动器提供了离线编程(生成程序,然后传输到机器人并执行)的替代方案。你可以直接在机器人上运行 RoboDK 中的仿真程序(在线编程)。有关驱动器的更多信息,可以参考机器人驱动器章节。
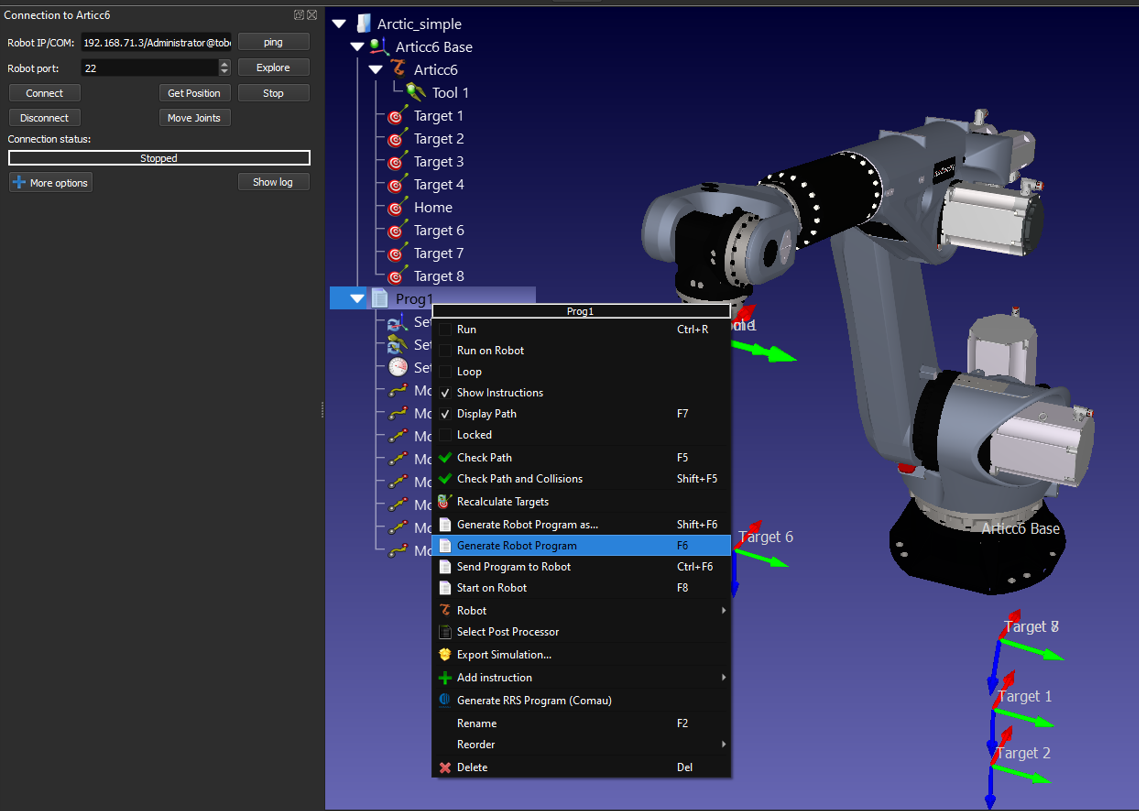
在RoboDK 连接到机器人的步骤:
1.在 RoboDK 中右击机器人。
2.选择:
3.输入机器人 IP 地址。
4.选择:连接。
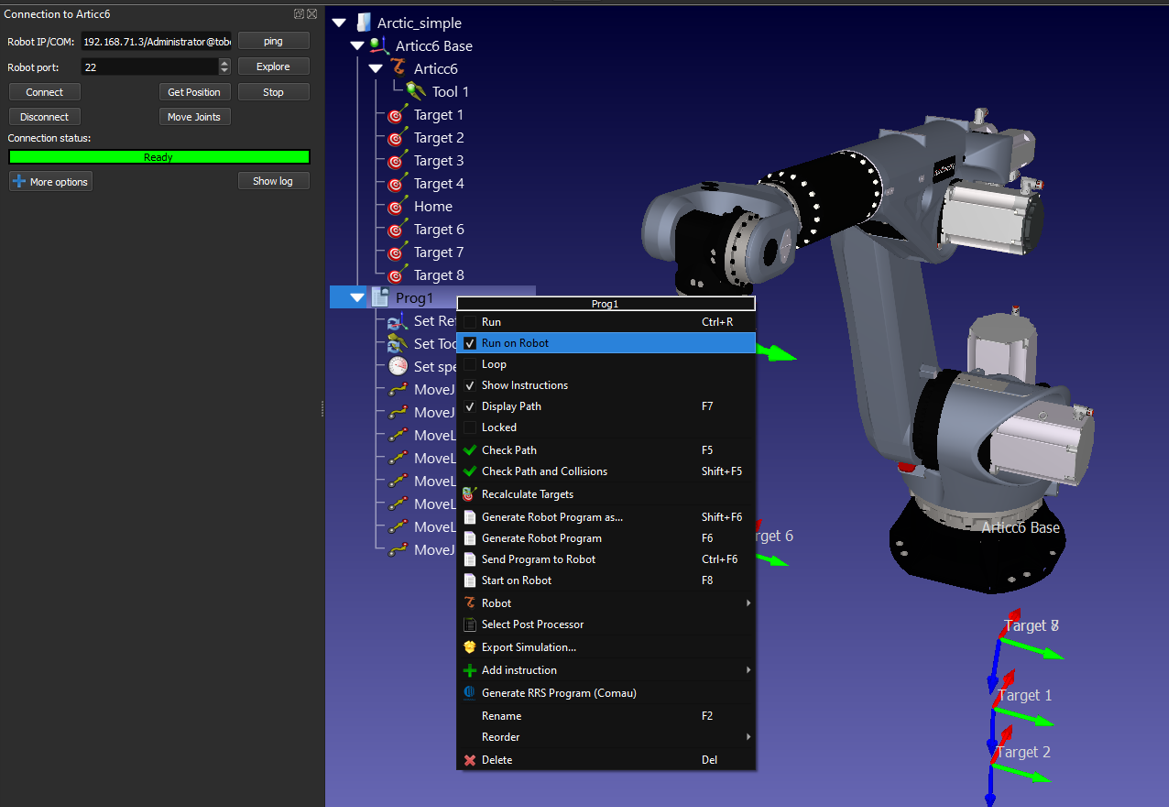
如果连接成功,连接状态会是显示绿色的Ready。如果没有,请检机器人的IP地址用户名和密码。此外,请确保在RoboDK 中正确设置IP 地址格式,如前几节所述(127.0.0.1/username@password)。
Note: 如果连接失败,请确保在计算机和机器人之间正确建立了网络连接。确保计算机 IP 与机器人位于同一网络。在 Windows 系统中,你可能需要管理员权限才能这样做。更多信息可以参考故障排除章节。
从连接菜单中选择:获取位置,点动机器人,然后点击:关节运动。即可移动机器人。
Tip: 如果机器人没有反应,双击:断开,可强制驱动器进程停止。然后,选择:连接,即可正常重启连接。
要从电脑直接在机器人上运行程序,应在程序中启用功能:在机器人上运行。以下步骤介绍了如何启用该功能:
a.右键单击:程序(本例中为 Print3D)
b.选择按钮:在机器人上运行
c.双击程序启动它(或右击并选择运行)
这种机器人编程方法对调试很友好,不过,要部署机器人程序,最好还是像上一节提到的离线生成程序那样。
勾选该选项:在机器人上运行后,我们每次双击程序(或右击,然后选择 "运行")时,它都会连接到真正的机器人。
这样操作在RoboDK API 文档中也有说明,它可以将机器人编程与其他应用程序整合在一起。API 可用 Python 和 C# 等程序语言编写。