运行程序
创建完RoboDK 程序后,你就可以离线生成由KEBA机器人控制器执行的程序(KAIRO 文件)。
请按照以下步骤,根据机器人仿真为控制器生成程序(KAIRO 文件):
1.右键单击程序。
2.选择按钮:生成机器人程序。然后通过 FTP 手动将文件传输到所需的项目中
或者,在设置 SFTP 后选择:生成机器人程序 Ctrl+F6
3.在示教器的Project选项卡上,按Refresh
4.加载程序,然后加载主文件

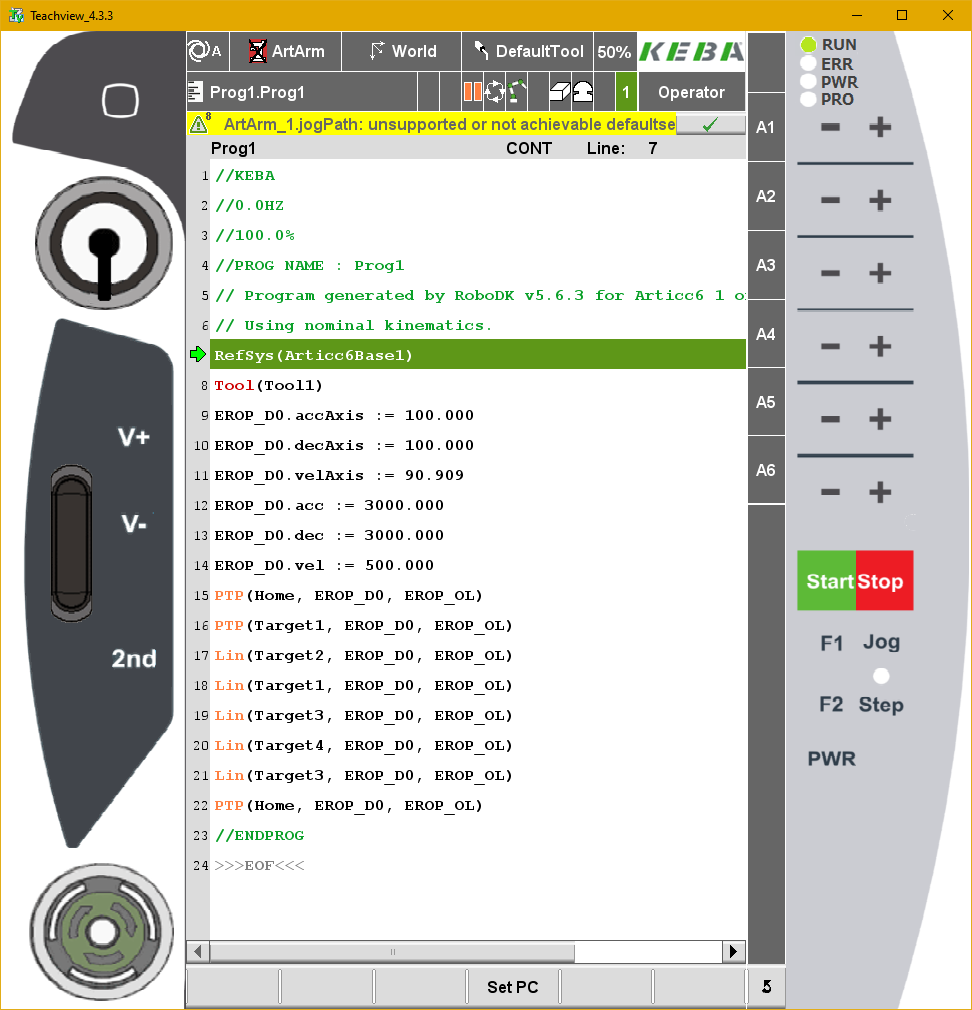
接下来程序将显示在文本编辑器中。更多有关如何从 RoboDK 生成程序的信息,可以参考机器人程序章节。
Tip:可以选择不同的后处理器或自定义后处理器,以定义程序的生成方式(例如支持夹爪或外部传感器)。