自动配置步骤
前提条件:RoboDK 版本为 5.5.2 或更高,操作系统为 Windows,安装路径为 C:\RoboDK。
1.打开命令提示符:用START➔All programs➔ Accessories➔Command Prompt或START➔Run➔cmd。
2.切换至RoboDK安装目录并启动kukabridge.exe:
c:
cd C:\RoboDK\bin
..\api\Robot\kukabridge.exe
3.此时KUKA桥接驱动进入交互模式。
4.输入以下命令连接控制系统:CONNECT <robot IP address> <port> <number of robot axes>
CONNECT 172.1.1.10 7000 6
5.如果连接成功,你将看到以下输出:
SMS:Connecting
Connected
SMS:Working...
SMS:Ready
6.输入CJNT命令,请求当前机器人关节位置:
CJNT
SMS:Working...
JNTS 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
SMS:Ready
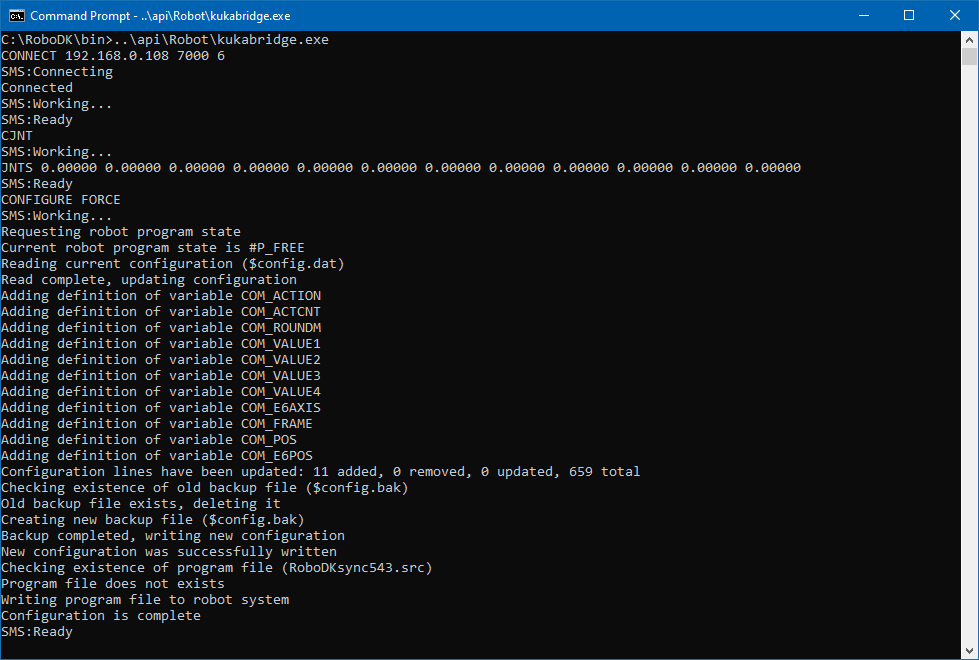
7.使用CONFIGUREFORCE命令执行自动配置:
CONFIGURE FORCE
SMS:Working...
Requesting robot program state
Current robot program state is #P_FREE
Reading current configuration ($config.dat)
Read complete, updating configuration
Adding definition of variable COM_ACTION
Adding definition of variable COM_ACTCNT
Adding definition of variable COM_ROUNDM
Adding definition of variable COM_VALUE1
Adding definition of variable COM_VALUE2
Adding definition of variable COM_VALUE3
Adding definition of variable COM_VALUE4
Adding definition of variable COM_E6AXIS
Adding definition of variable COM_FRAME
Adding definition of variable COM_POS
Adding definition of variable COM_E6POS
Configuration lines have been updated: 11 added, 0 removed, 0 updated, 659 total
Checking existence of old backup file ($config.bak)
Old backup file exists, deleting it
Creating new backup file ($config.bak)
Backup completed, writing new configuration
New configuration was successfully written
Checking existence of program file (RoboDKsync543.src)
Program file does not exists
Writing program file to robot system
Configuration is complete
SMS:Ready
8.配置完成后,选择并运行程序RoboDKsyncVER.src(VER 为版本号,如 543)。