RoboD
机器人驱动器是离线编程的替代方案(即不需要预先生成和传输程序)。通过驱动器,可以直接在机器人上运行仿真,实现在线编程。详情请参阅文档中的机器人驱动器章节。
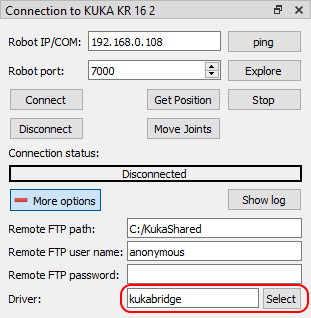
你可以通过标准以太网(TCP/IP)连接在 RoboDK 和 KUKA 控制器之间建立通信,实现从电脑自动移动机器人,启用 “在机器人上运行” 功能,用于在线调试和控制。
若你的 RoboDK 版本较旧,可能使用的是旧版驱动(apikuka,基于 KUKAVARPROXY 项目)。要使用当前驱动,请确保在“连接到机器人”窗口的“更多选项”中选择驱动程序:kukabridge。
配置 RoboDK 的 KUKA 驱动器步骤如下:
1.从指定链接下载最新版本的C3Bridge安装文件(c3setup.exe)。
2.使用 KUKA 的 HMI 将 c3setup.exe 文件复制到控制器桌面或系统文件夹。
3.可选但推荐:连接鼠标。
可将 USB 插入示教器或控制器(不需重启)
或建立远程桌面连接
也可直接使用示教器触摸屏与虚拟键盘操作
4.使用KUKA HMI应用,可以通过屏幕左上角的库卡按钮
a.
b.
5.找到之前复制的 c3setup-X.Y.Z.exe 文件(例如 1.7.1 版本),运行并按照提示完成安装
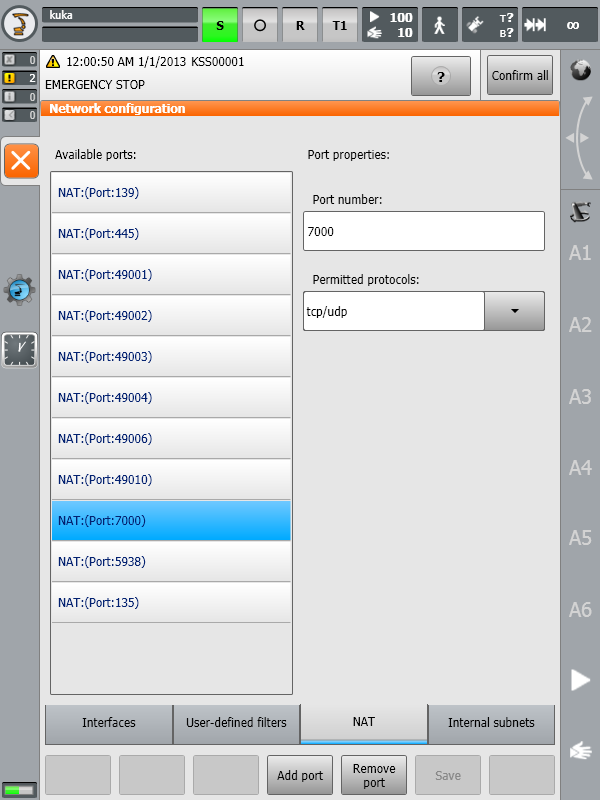
6.为 TCP/UDP 通信打开端口 7000(或其他端口,详见下方说明)(KRC2 控制器无需此步骤)
a.恢复HMI界面
b.
c.NAT➔Add port➔Port number 7000
d.设置允许的协议:TCP/UDP
7.通过桌面快捷方式或“Start Menu”启动 C3 Bridge Server
(若在安装时已勾选“Run C3 Bridge Server”,可跳过此步)
8.若希望系统启动时自动运行 C3 Bridge Server,请将桌面快捷方式复制至“Startup”文件夹
Note:自 2020 年起,新款 KUKA 控制器运行 Windows 10 IOT。若端口 7000 被 nginx 进程占用,请参考“更改C3 Bridge Server端口号”部分进行调整。
C3 Bridge Server 现已就绪,你可以让其常驻后台运行。它支持在 KUKA 控制器与远程 PC 之间交换全局变量、上传下载 KRL 程序、控制程序执行等操作。
控制系统的进一步配置可通过两种方式实现:使用 KRC4 上 kukabridge 驱动的交互模式自动配置,在 KUKA HMI 中手动编辑控制系统文件。
更改C3 Bridge Server端口号
C3Bridge服务器将其设置保存在WindowsNote册表中。请按照以下步骤更改网络端口:
1.终止C3桥接服务器。
2.打开注册表编辑器,导航至路径:HKEY_CURRENT_USER\SOFTWARE\C3 Bridge Interface。
3.将NetworkTcpPort键值更改为除 7000 外的其他端口(例如 7001)。
4.重新启动 C3 Bridge Server,并重复上一节中第 6 步的操作(打开所用端口的访问权限)。
新版本的 C3 Bridge Server(1.7.1 及更高)支持命令行参数。你可以通过 -tcpPort 参数更改服务器端口,例如:
c3bridge.exe -tcpPort 7001
使用脚本自动配置
位于 C:\RoboDK\Library\Scripts 文件夹中的脚本 KUKA_Auto_Configuration.py 可用于自动配置 KUKA 控制系统。前提:当前 RoboDK 工程中需至少包含一个已设置正确 IP 和端口在连接机器人窗口。你可以通过RoboDK菜单栏 “工具➔运行脚本”或使用快捷键 Shift+S 运行此脚本。
自动配置步骤
前提条件:RoboDK 版本为 5.5.2 或更高,操作系统为 Windows,安装路径为 C:\RoboDK。
1.打开命令提示符:用START➔All programs➔ Accessories➔Command Prompt或START➔Run➔cmd。
2.切换至RoboDK安装目录并启动kukabridge.exe:
c:
cd C:\RoboDK\bin
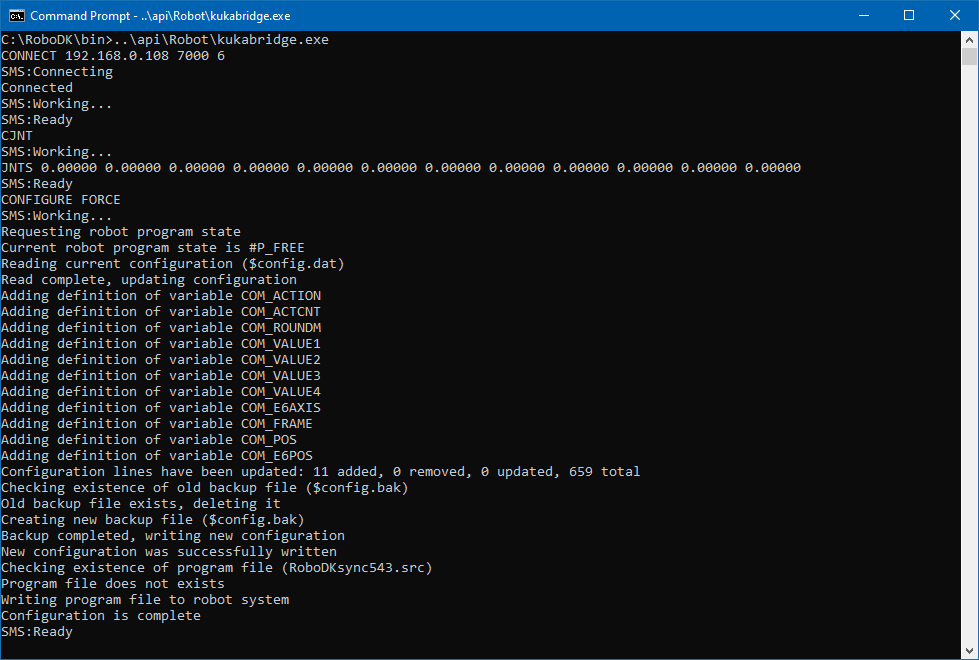
..\api\Robot\kukabridge.exe
3.此时KUKA桥接驱动进入交互模式。
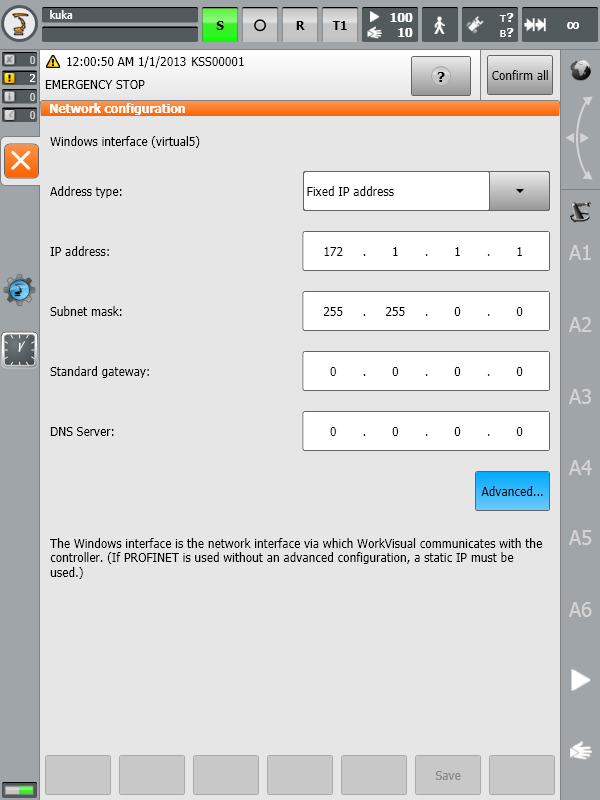
4.输入以下命令连接控制系统:CONNECT <robot IP address> <port> <number of robot axes>
CONNECT 172.1.1.10 7000 6
5.如果连接成功,你将看到以下输出:
SMS:Connecting
Connected
SMS:Working...
SMS:Ready
6.输入CJNT命令,请求当前机器人关节位置:
CJNT
SMS:Working...
JNTS 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000 0.00000
SMS:Ready
7.使用CONFIGUREFORCE命令执行自动配置:
CONFIGURE FORCE
SMS:Working...
Requesting robot program state
Current robot program state is #P_FREE
Reading current configuration ($config.dat)
Read complete, updating configuration
Adding definition of variable COM_ACTION
Adding definition of variable COM_ACTCNT
Adding definition of variable COM_ROUNDM
Adding definition of variable COM_VALUE1
Adding definition of variable COM_VALUE2
Adding definition of variable COM_VALUE3
Adding definition of variable COM_VALUE4
Adding definition of variable COM_E6AXIS
Adding definition of variable COM_FRAME
Adding definition of variable COM_POS
Adding definition of variable COM_E6POS
Configuration lines have been updated: 11 added, 0 removed, 0 updated, 659 total
Checking existence of old backup file ($config.bak)
Old backup file exists, deleting it
Creating new backup file ($config.bak)
Backup completed, writing new configuration
New configuration was successfully written
Checking existence of program file (RoboDKsync543.src)
Program file does not exists
Writing program file to robot system
Configuration is complete
SMS:Ready
8.配置完成后,选择并运行程序RoboDKsyncVER.src(VER 为版本号,如 543)。
手动配置步骤
接下来为配置处理机器人动作的主程序:
1.声明以下全局变量:
使用KUKA HMI修改文件:KRC:\R1\SYSTEM\$CONFIG.DAT
也可以通过Windows路径访问:C:\KRC\ROBOTER\KRC\R1\SYSTEM\$CONFIG.DAT
INT COM_ACTION=0
INT COM_ACTCNT=0
REAL COM_ROUNDM=0
REAL COM_VALUE1=0
REAL COM_VALUE2=0
REAL COM_VALUE3=0
REAL COM_VALUE4=0
DECL E6AXIS COM_E6AXIS
DECL FRAME COM_FRAME
DECL POS COM_POS
DECL E6POS COM_E6POS
2.将 KUKA 的 SRC 程序 RoboDKsyncVER.src 复制到 KRC\R1\PROGRAM 文件夹
文件名中 VER 表示版本号(如 RoboDKsync543.src)
3.手动启动 RoboDKsyncVER.src 程序,使机器人监听来自电脑的命令
即便程序未运行,只要 C3 Bridge Server 在控制器上运行,RoboDK 仍能读取机器人关节信息。