Navigation offcanvas
以下步骤可用于从机器人中提取各关节的位置:
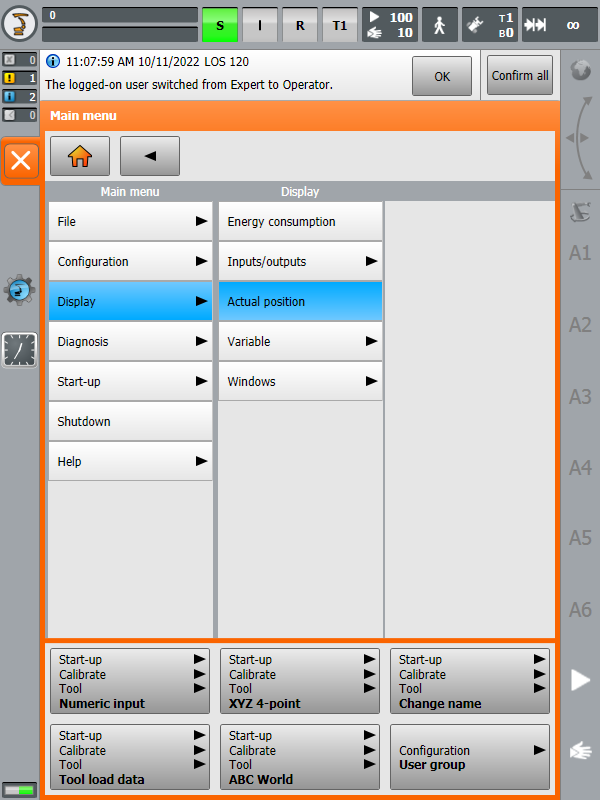
1.选择KUKA➔Display➔Actual position
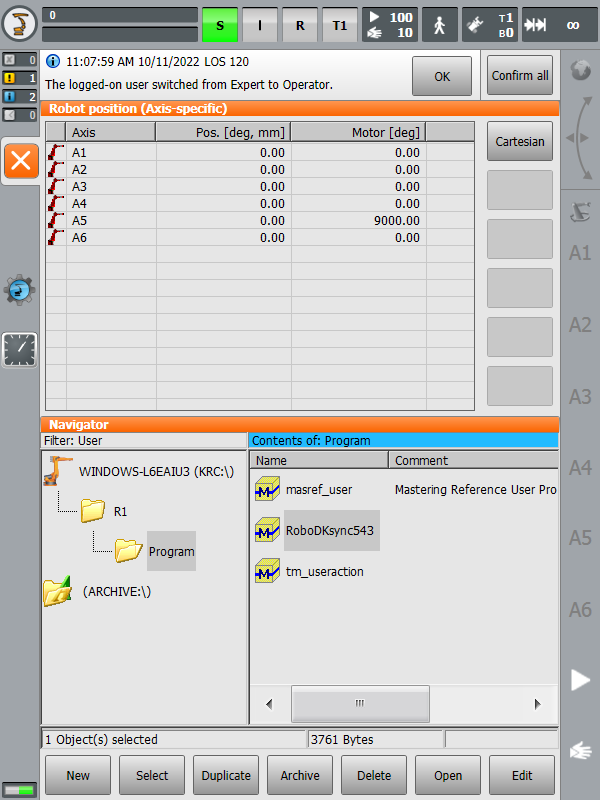
2.选择"Joints"模式,使用左侧栏选择机器人关节
Tip:你也可以通过监控 $AXIS_ACT 变量,或使用 RoboDK 的 KUKA 驱动器点击“获取机器人关节”按钮,以更高精度(小数点后五位)获取机器人关节位置。
 KUKA➔Display➔Actual position
KUKA➔Display➔Actual position