编辑后处理器
在为 KUKA KRC控制器生成机器人程序时,可以根据你在 RoboDK 中输入的坐标系($BASE)和工具($TOOL)来定义这些变量,也可以选择使用编号的坐标系和编号工具。
默认情况下,RoboDK 会以你在软件中输入的方式导出工具和坐标系的完整位姿(XYZABC 数值)。以下代码展示了 RoboDK 为 KUKA 的 SRC 程序所生成的示例内容:
; ---- Setting tool (TCP) ----------
; TOOL_DATA[3]={FRAME: X 116.058,Y 0.0,Z 219.481,A 0.0,B 60.0,C 0.0}
$TOOL = {FRAME: X 116.058,Y 0.0,Z 219.481,A 0.0,B 60.0,C 0.0}
; $TOOL=TOOL_DATA[3]
; ----------------------------------
; ---- Setting reference (Base) ----
; BASE_DATA[1]={FRAME: X 640.289,Y -290.0,Z 0.0,A 90.0,B 0.0,C 0.0}
$BASE = {FRAME: X 640.289,Y -290.0,Z 0.0,A 90.0,B 0.0,C 0.0}
; $BASE = BASE_DATA[1]
; ----------------------------------
另一方面,如果你更倾向于将工具($TOOL 变量)和坐标系($BASE 变量)链接到编号的工具和参考坐标系,可以在后处理器中更改以下变量设置:
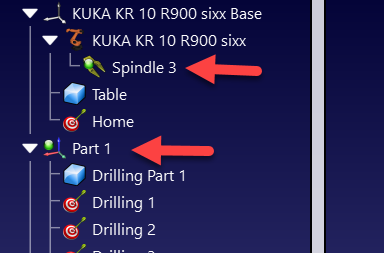
●FRAME_INDEX:将此变量设置为 True,即可将参考坐标系链接至编号的基准框架。你应确保在 RoboDK 工程中已为该坐标系指定编号,如下图所示。
●TOOL_INDEX:将此变量设置为 True,即可将工具链接至编号的工具。你应确保在 RoboDK 工程中也为该工具指定编号,如下图所示。
Note:有关如何编辑后处理器的更多信息,请参见后处理器章节。
Tip:当使用外部轴时,建议使用编号坐标系。在程序中使用编号坐标系可以避免对 RoboDK 中外轴运动学的精确匹配要求