Navigation offcanvas
以下步骤允许你在机器人控制器中创建或修改机器人工具(TCP,也就是 KUKA KRC 机器人程序中的 $TOOL):
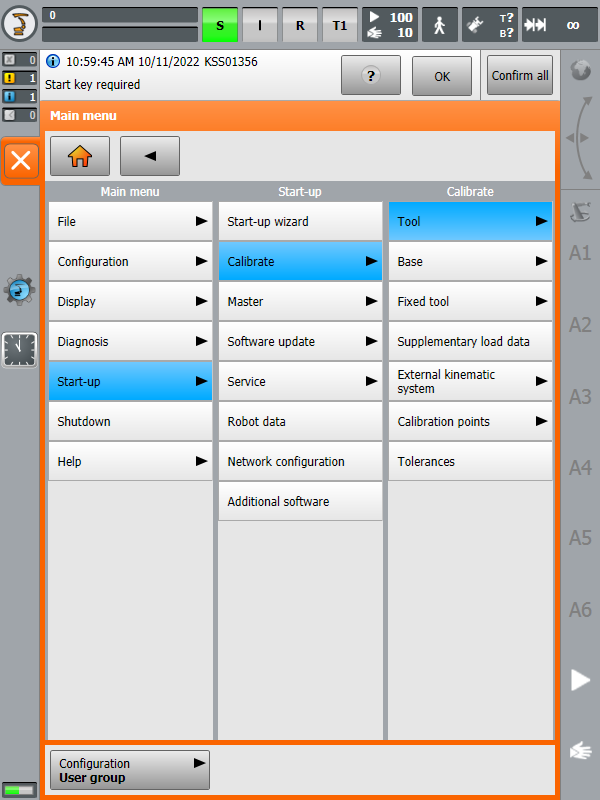
1.选择 KUKA➔Start-up➔Calibrate➔Tool
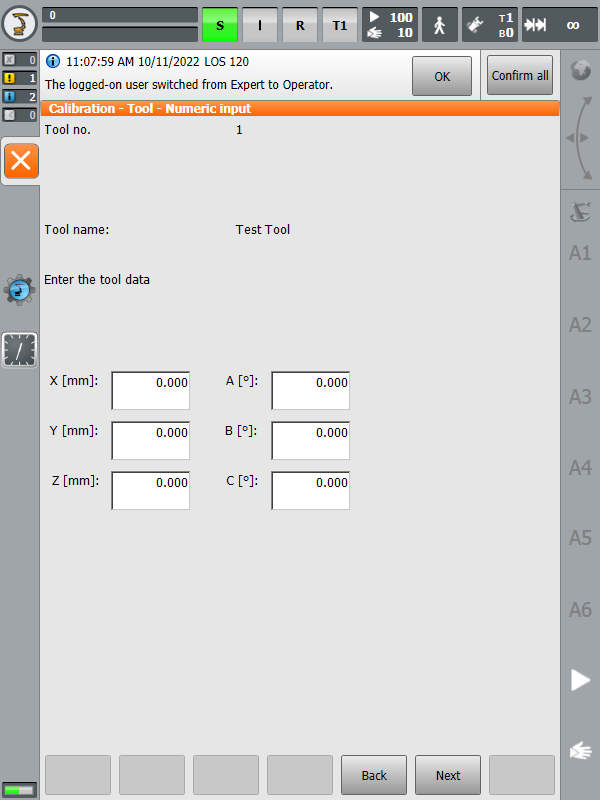
2.选择一个工具,然后编辑或获取该工具的X、Y、Z位置(即TCP位置)
 KUKA➔Start-up➔Calibrate➔Tool
KUKA➔Start-up➔Calibrate➔Tool