故障排除
本节介绍了如何确定、诊断和修复在RoboDK中使用库卡(Kuka)机器人驱动器时可能遇到的问题。
检查端口7000可用性
你应进入库卡控制器上的专家用户组,以排除7000端口的故障问题。
1.
2.
3.在Windows系统,START➔All programs➔ Accessories➔Command Prompt
或START➔Run➔cmd
4.使用该命令请求查看所有连接和监听端口的列表:
netstat -a -b -n -o -p TCP | findstr :7000
5.如果响应不包含任何字符串,则端口7000空闲,可用于驱动器操作。可以跳过后续步骤。
6.如果对第4步命令的响应是这样的
TCP 0.0.0.0:7000 0.0.0.0:0 LISTENING 1840
7.上面一行的最后一个数字是进程标识符(PID)。可以使用以下命令获取有关进程名称的信息(应使用自己的编号而不是1840):
tasklist/fi"PIDeq1840"
8.任务列表命令的结果包含正在监听端口7000的进程信息。输出示例
Image Name PID Session Name Session# Mem Usage
========================= ======== ================ =========== ============
c3bridge.exe 1840 Console 1 5,912 K
9.如果端口被KukavarProxy.exe或c3bridge.exe进程占用,则系统可以使用所选驱动器。如果端口被其他程序占用,则必须终止该程序或更改C3 Bridge Server端口号。
卸载旧版驱动器
如果你一直在使用KUKAVARPROXY,并希望升级到C3BridgeServer,则无需特殊的卸载程序。将库卡(HMI)最小化,关闭KUKAVARPROXY并确保系统启动时不会自动加载(START➔Allprograms➔Startup中没有快捷方式)。无需删除KUKAVARPROXY可执行文件。
配置错误
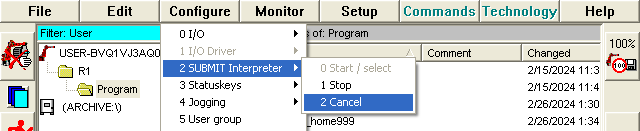
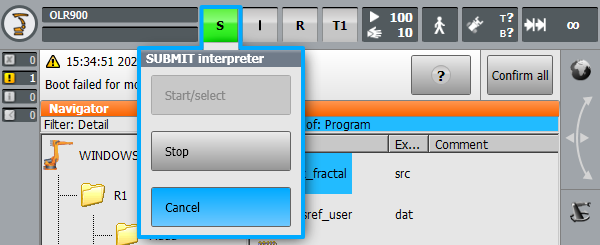
自动或手动配置控制系统的程序可能会失败。最常见的原因是无法覆盖$config.dat文件。该文件只能由具有高级权限(专家)的用户编辑。另一个条件是停止所有解释器:机器人和提交。要停止机器人解释器,只需取消任何选定的程序,如果控制系统刚刚加载,则不选择任何程序。要取消提交解释器,请使用HMI,如下图所示,分别用于KRC2和KRC4系统:
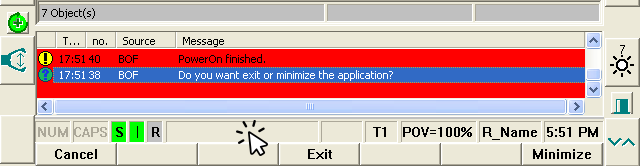
如果在停止所有解释器后$config.dat文件仍被锁定,则可以完全停止机器人控制系统软件部分的执行。在KRC2系统中,点击状态指示器(SIR)旁边的矩形区域,然后点击Cancel按钮:
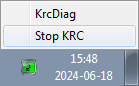
在KRC4系统中,点击托盘区的绿色机器人图标,然后选择"Stop KRC":
停止控制软件后,可以使用任何文本编辑器修改文件:C:\KRC\ROBOTER\KRC\R1\System\$config.dat。重新启动操作系统以应用更改。