安川的
机器人驱动程序为离线编程提供了另一种选择。通过安川(Motoman)驱动器,你可以在仿真程序(在线编程)时直接从RoboDK操控机器人移动。更多信息请参阅机器人驱动器章节。
自RoboDK 4.2版本起,你可通过RoboDK机器人驱动程序使用高速以太网服务器(HSE)协议及名为MotomanHSE的驱动连接机器人控制器。该驱动程序无需用户配置MotoCom软件选项。此通信协议(亦称"远程"协议)已默认集成于安川电机最新款机器人控制器中,支持以70Hz刷新率实现计算机对机器人的运动控制与状态监控。
在主菜单选择:连接-连接到机器人,输入机器人IP,然后在连接机器人窗口选择:连接(可以忽略端口)。确保使用支持 HSE 协议(MotomanHSE)的最新驱动器路径。
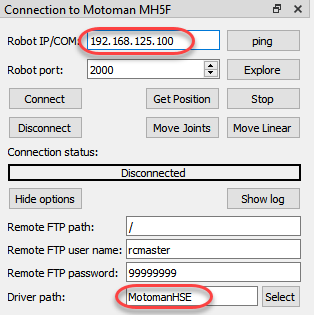
要在机器人上启用此操作模式,你只需将示教器设置为远程模式即可。

这样便可以使用RoboDK程序功能:在机器人上运行,进行在线编程和调试。连接可以通过标准以太网连接(TCP/IP - UDP)建立。
配置将自动完成,无需在机器人控制器上进行任何特定设置。
以下控制器可与高速以太网服务器驱动器配合使用:
●DX100
●DX200
●FS100
●NX100
●YR1000
Note:如果你的安川(Motoman)控制器不支持高速以太网服务器协议(如 XRC 机器人控制器),你可以使用 RS232 等串行连接(请确保指定COM端口而非IP地址)。
RoboDK与任何安川机器人之间也可建立连接,通过RoboDK和安川的MotoCom软件选项以及apimotoman驱动程序,从连接的PC端实现机器人自动移动。