更新脉冲值
安川(Motoman)机器人需要知道所有机器人轴每度的脉冲比率,以便将关节角度值转换为脉冲,反之亦然。如果在机器人参数中正确提供了每度脉冲比率,RoboDK会自动生成带有正确脉冲信息的程序。
你可以从RoboDK 中加载安川(Motoman)控制器中将ALL.PRM文件加载到RoboDK中,以自动提取脉冲/度比率。执行完整控制器备份时,ALL.PRM文件应该可用。以下步骤演示了在这种情况下使用的程序:
1.在 RoboDK 中打开机器人。
2.将 ALL.PRM 文件拖放到 RoboDK 中打开。
3.接受更改后,你应该会看到机器人的脉冲/度信息已更新。如果未选择正确的机器人,你可能会看到一条警告信息。
4.脉冲/度数信息与 RDK 项目文件一起保存。你还可以右击机器人并选择:另存为...保存机器人,并在其他项目中右击机器人并选择:替换机器人。
Note:你可能需要安装 Python 2.7 才能运行此自动程序。或者,你也可以按照接下来的步骤手动输入这些参数。
按照以下步骤验证此信息是否适用于你的机器人(或进行更新):
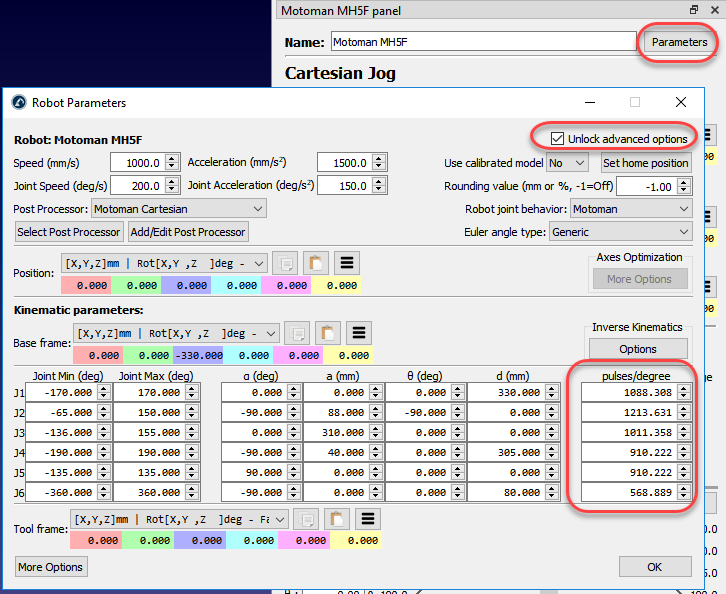
1.在 RoboDK 中双击:安川(Motoman)机器人
2.在机器人面板选择:参数
3.在参数界面选择:解锁高级选项
4.查看或更新每个关节的脉冲/度值
更新这些信息后,你就可以使用正确的脉冲/度数信息生成程序。