欧姆龙(Omron)-TM 机器人
欧姆龙TM机器人可通过RoboDK使用TMFlow ZIP文件进行离线编程。当机器人处于监听节点时,你可以使用机器人驱动程序,直接从RoboDK实时控制机器人移动。
通过USB传输程序
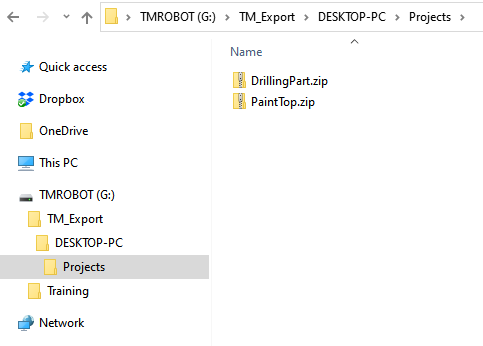
使用默认的后处理器,你将获得一个ZIP格式的程序文件。为了正确地将文件加载到机器人上,你需要准备一个具有以下特性的U盘:
1.将U盘命名为:TMROBOT(此步骤非常重要)。
2.在U盘根目录下新建文件夹:TM_Export。
3.在TM_Export文件夹内新建项目文件夹:名称任意。
4.在上述项目文件夹内新建文件夹:Projects。
5.将ZIP格式的程序文件放入Projects文件夹内。
Important:USB驱动器的名称以及TM_Export内的目录结构非常重要,否则你将无法从机器人控制器中看到文件。只要不更改TM_Export文件夹内的目录结构,你仍可将此USB驱动器用于其他用途。
在TMFlow 中加载程序过程:
1.将RoboDK生成的ZIP文件按照之前的步骤保存到USB驱动器的文件夹中。
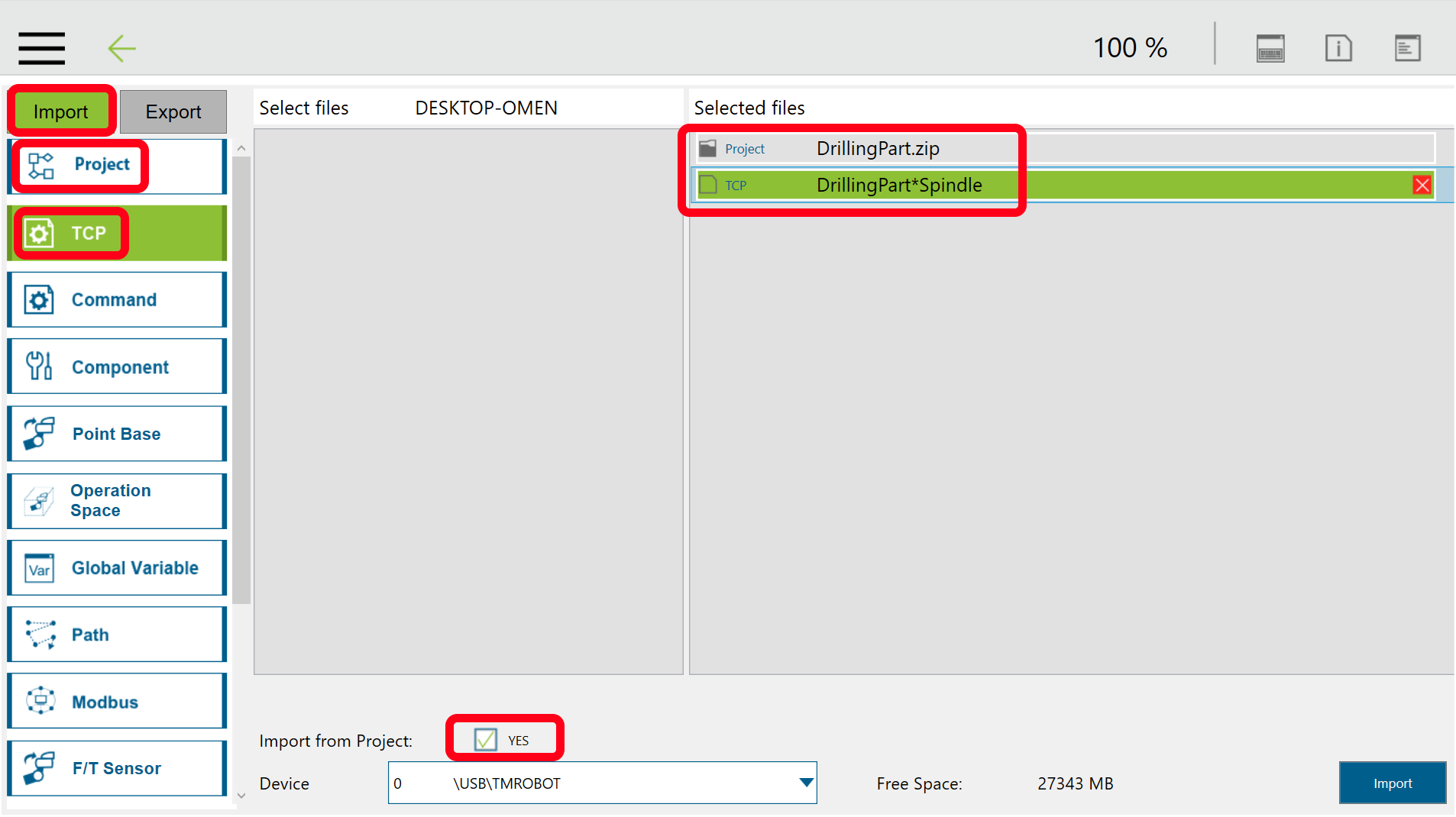
2.选择:主菜单➔System➔Import/Export
3.选择:Import,然后在TM_Export 中选择文件夹
4.选择:项目,并选择 ZIP 程序
5.选择:TCP
6.勾选Import from project的YES
7.选择你的程序并选择程序中的工具以确保加载它们。
8.选择:导入
现在,当你选择打开新程序时,你的程序就可以使用了。
Note:如果你的机器人控制器中已经定义了工具,则无需执行步骤5、6和7。你只需在RoboDK中使用与机器人控制器中相同的名称来命名你的工具即可。
设置监听节点
你可以通过使用欧姆龙-TM机器人的RoboDK驱动器,直接从RoboDK运行程序。你还可以生成通过TCP/IP协议传输的脚本文件。在这两种情况下,你都应确保机器人处于监听节点。本节将介绍如何在RoboDK和欧姆龙-TM机器人上设置通信。
可以选择不同的后处理器或自定义后处理器,以定义离线生成和执行程序的方式(例如,支持夹具或外部传感器)。
Note:欧姆龙(Omron)机器人的默认后处理器(称为欧姆龙(Omron)或达明(Techman))会生成一个 ZIP 文件,你可以按照上一章节所述手动加载该文件。或者,远程后处理器将生成 SCRIPT 程序和一个可远程使用的PY文件。执行PY文件将自动连接到机器人,并通过TCP/IP发送SCRIPT文件。
Note:使用远程后处理器生成程序时,将获得 2 个文件:一个SCRIPT 文件和一个PY 文件。你应执行PY文件,在机器人上自动传输和运行程序。
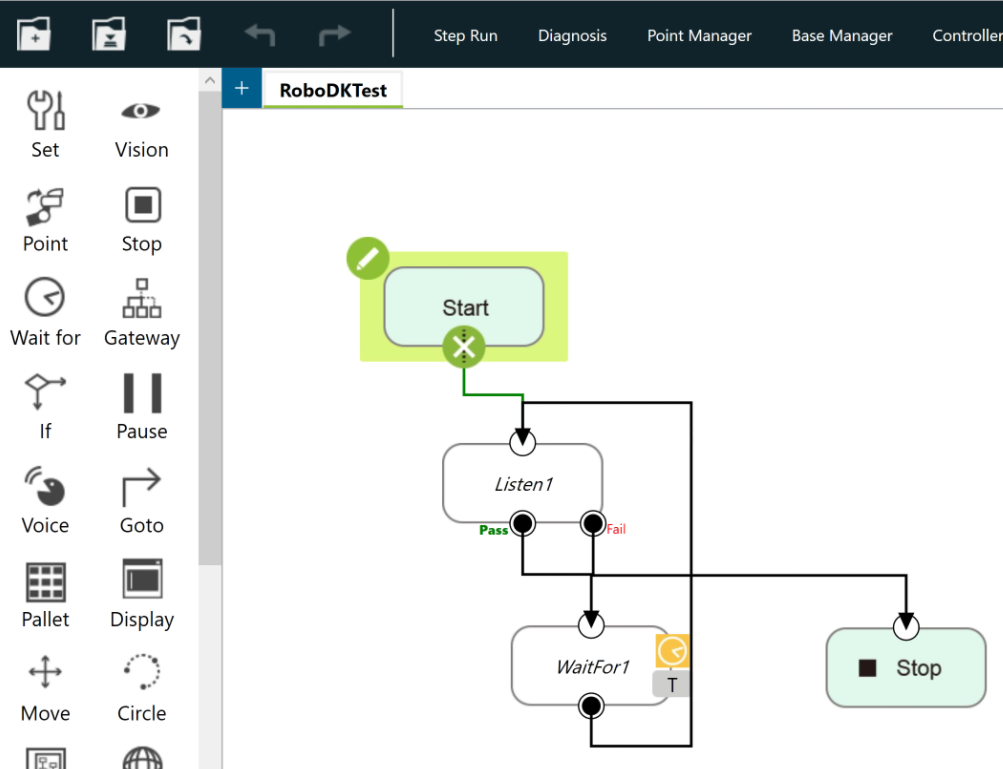
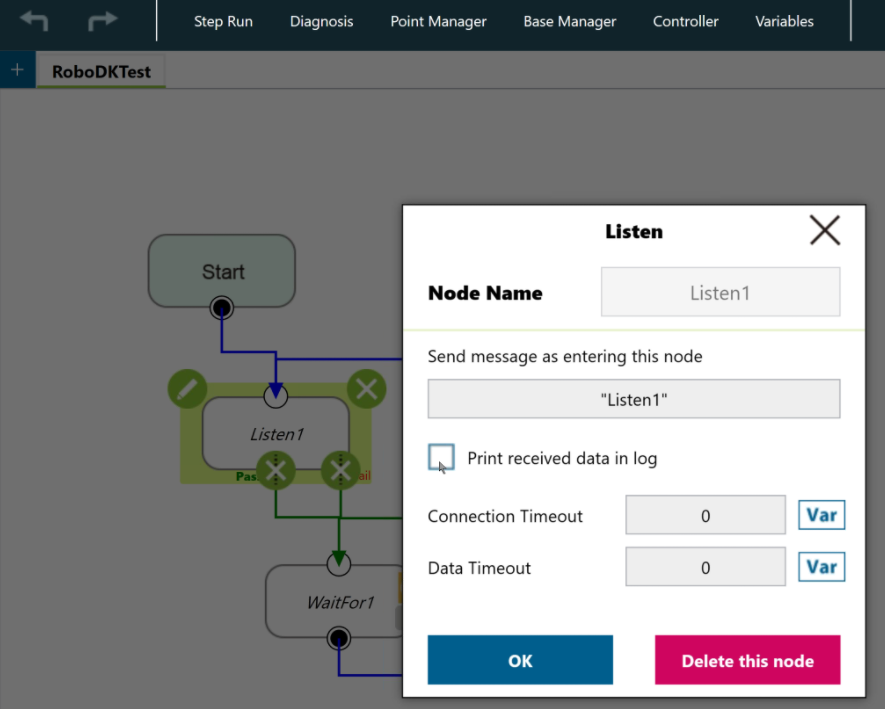
要实现远程移动,机器人必须处于监听模式。这可以通过监听节点来实现。下图显示了建议的程序工作流程,让程序自动执行 RoboDK 发送的程序。建议选择在日志中打印接收到的数据,以便排除故障。
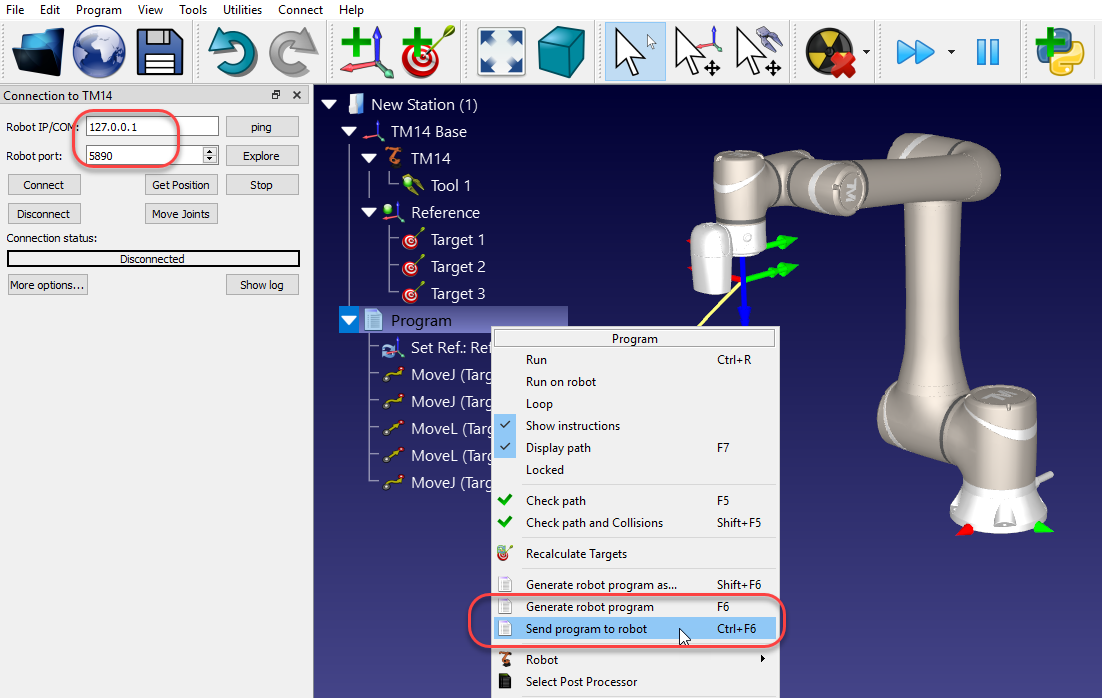
在RoboDK 中设置通信并运行程序:
1.在主菜单栏中选择:连接➔连接机器人
2.输入机器人IP
3.端口输入:5890
4.右键点击:程序
5.选择:生成机器人程序 F6。
Important: 如果机器人已处于监听模式,则会立即启动程序。在调试过程中,请确保以慢速启动。
Note:也可以选择 "发送程序到机器人"(Ctrl+F6),在机器人上自动触发程序的执行。