更新机器人运动学参数
本节操作步骤为可选流程,仅当离线编程需要高精度时才需执行。下文将介绍如何在RoboDK中输入您所用UR机器人的专属运动学参数,以实现精确模拟。
Important:若你已对机器人进行校准,并希望生成可补偿真实机器人误差的过滤程序,则必须执行此流程。
每台UR控制器的运动学参数具有唯一性。这些参数以DH参数表(Denavit-Hartenberg)形式定义机器人的几何尺寸。RoboDK模拟器默认使用UR标称运动学参数,因此模拟器与控制器之间可能存在2-10毫米的位姿偏差。
要使模拟结果与真实机器人完全吻合,你可通过直接打开示教器生成的URP文件来导入专属运动学参数。
Note:所用URP文件必须由待模拟的控制器生成。
你也可按以下步骤手动加载URP文件:
1.获取通过真实机器人生成的URP文件(非RoboDK或UR模拟器生成)
2.打开RoboDK中的机器人模型(可从RoboDK库调用UR机器人,或使用现有工作站中的模型)
3.菜单栏选择:工具➔运行脚本
4.执行UR_LoadControllerKinematics脚本
5.加载从机器人控制器提取的URP文件
加载成功后将显示如下图所示提示信息。若加载无效URP文件或选错机器人型号,系统会显示警告提示。
完成此流程后,你可以右键点击机器人并选择"另存为.robot文件"。相关参数将随机器人文件保存,后续新建项目时可直接调用该文件,无需重复此流程。
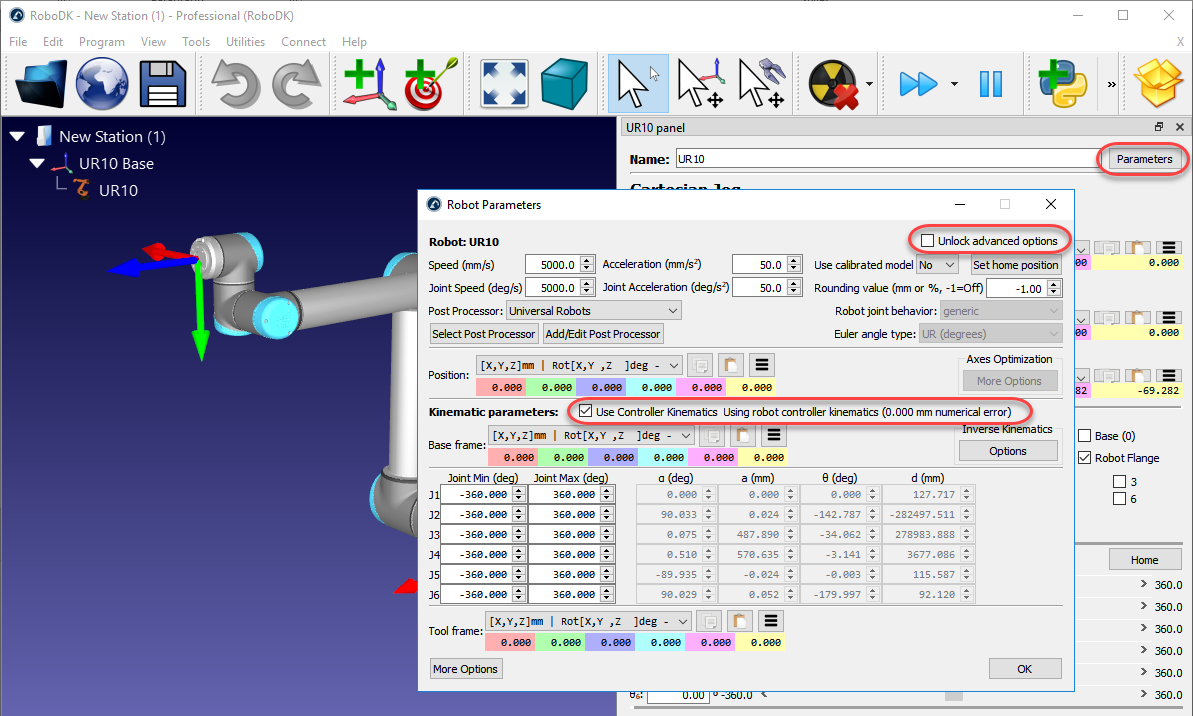
RoboDK会从URP文件中提取你机器人的专属参数,并在机器人文件中将其应用于仿真与离线编程。如需恢复默认运动学参数,可通过机器人参数菜单进行设置(如下图所示)。
此时你将观察到:示教器显示的位姿数据会与RoboDK中的运动学参数完全匹配(注意:需在RoboDK和UR机器人中移除工具坐标系与参考坐标系后再进行比对)。
Note: RoboDK采用改进型DH参数(modified Denavit Hartenberg),与UR标准DH参数不同。系统会自动将URP文件中的DH参数转换为改进型DH参数,因此不可直接将urcontrol.conf.[UR3/UR5/UR10]文件中的参数复制到本表格使用。
每台UR机器人的运动学参数均经过出厂校准,具有唯一性。而其他品牌(如KUKA、ABB、安川或发那科)除非选购绝对精度选项(涉及40余项校准参数),否则不进行出厂校准。
本流程与RoboDK的机器人校准有本质区别——后者用于提升真实机器人的绝对精度。