通过
借助RoboDK离线生成的程序,你可直接从UR控制器端操作RobotiQ夹爪。
启用RobotiQ夹爪支持需按以下步骤选择专用后处理器:
1.右键单击程序或机器人
2.选择:选择后处理程序
3.指定"Universal_Robots_RobotiQ"后处理器
Tip:程序关联的后处理器变更将作用于所有使用同款机器人的程序
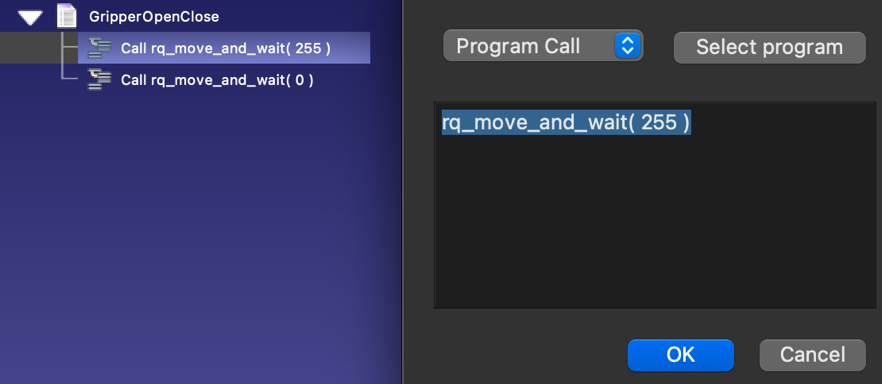
配置完成后,我们可以生成夹爪控制指令,例如:rq_move_and_wait(255)完全打开夹爪,或rq_move_and_wait(0)完全关闭夹爪。
在RoboDK中完成程序准备后,可通过以下两种方式在机器人上运行程序:
- 右键单击程序(如GripperOpenClose),然后选择"发送程序到机器人"。
- 右键单击程序(GripperOpenClose),然后选择生成程序(此方式需手动将程序加载到机器人)。
此操作方式无需使用驱动程序。
Tip:进一步了解如何在程序部分生成程序。