在
你可以使用URSim测试RoboDK和优傲(UniversalRobots)控制器之间的连接。
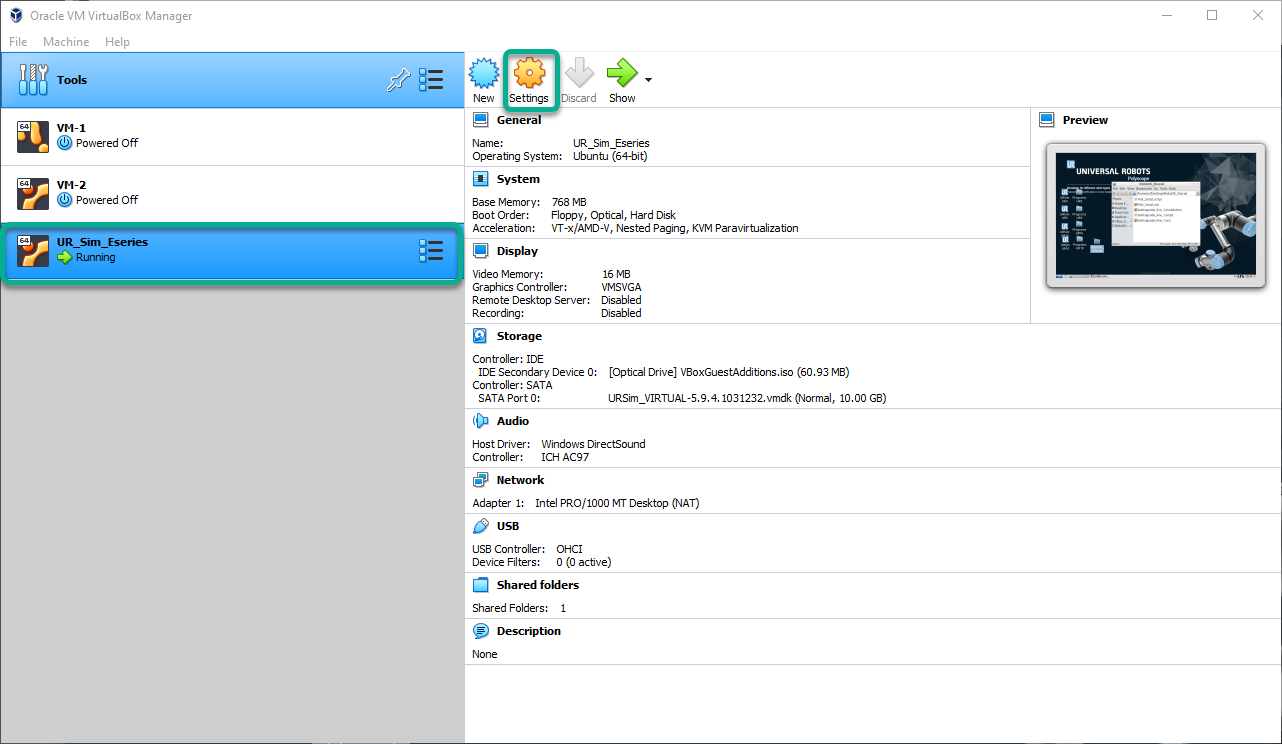
1.在OracleVMVirtualBox管理器中。
2.选择UR_Sim_EseriesVM并按设置。
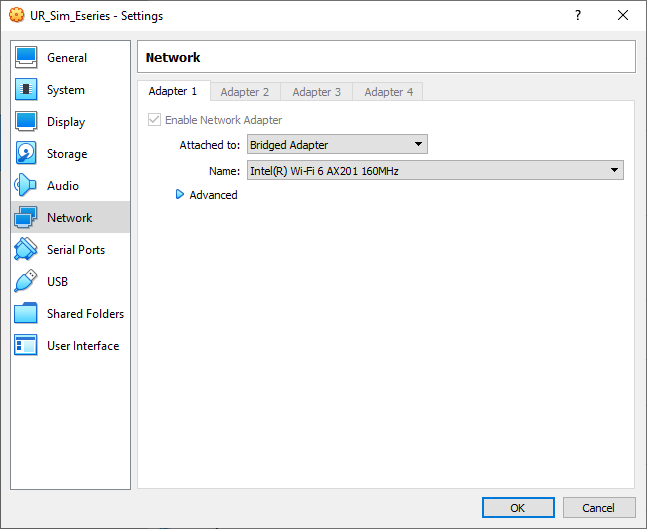
3.选择 Network➔Attached:并选择BridgeAdapter(网桥适配器),然后按OK(确定)。
4.启动URSim虚拟机器加工。
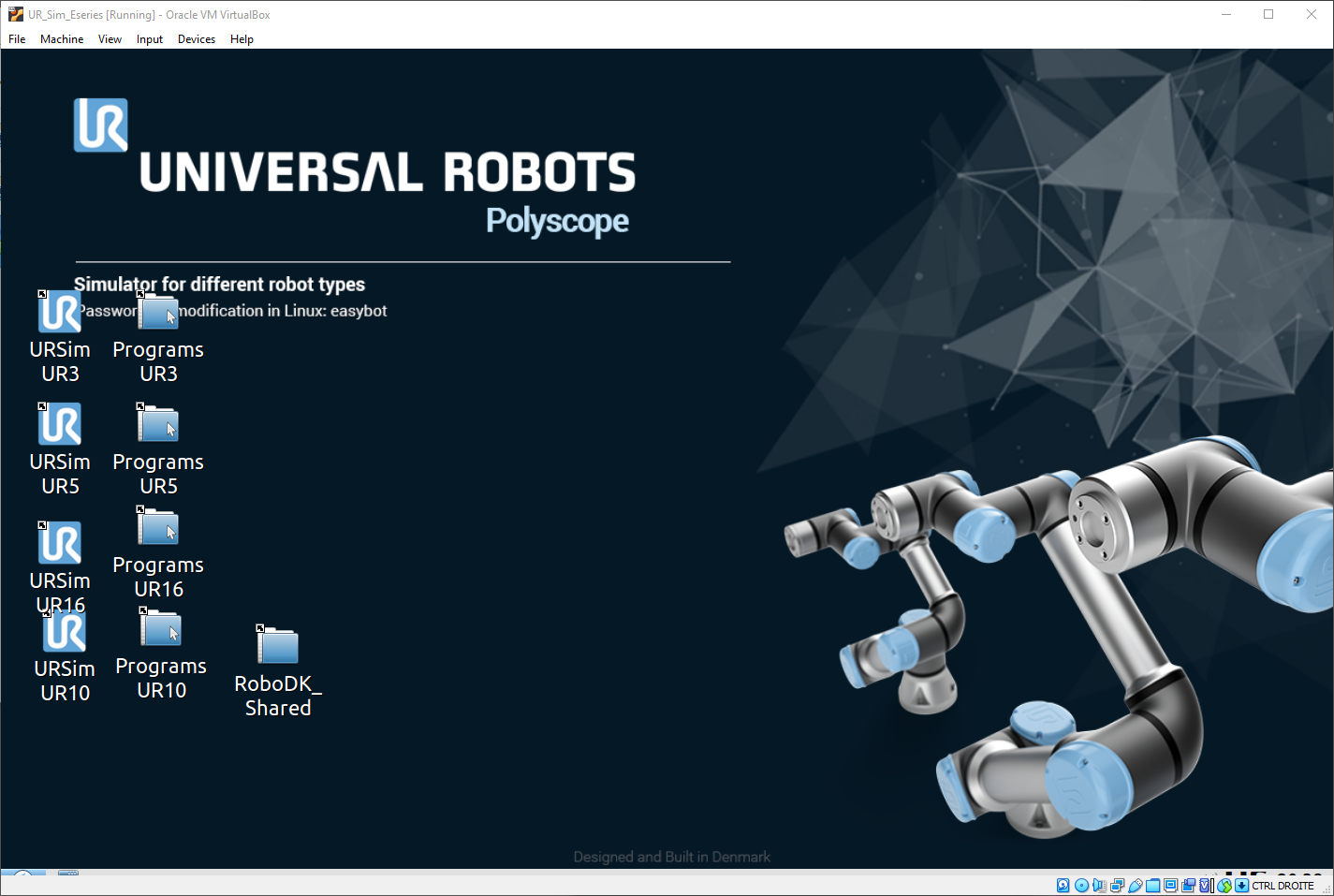
5.使用你首选的UR型号启动Polyscope。
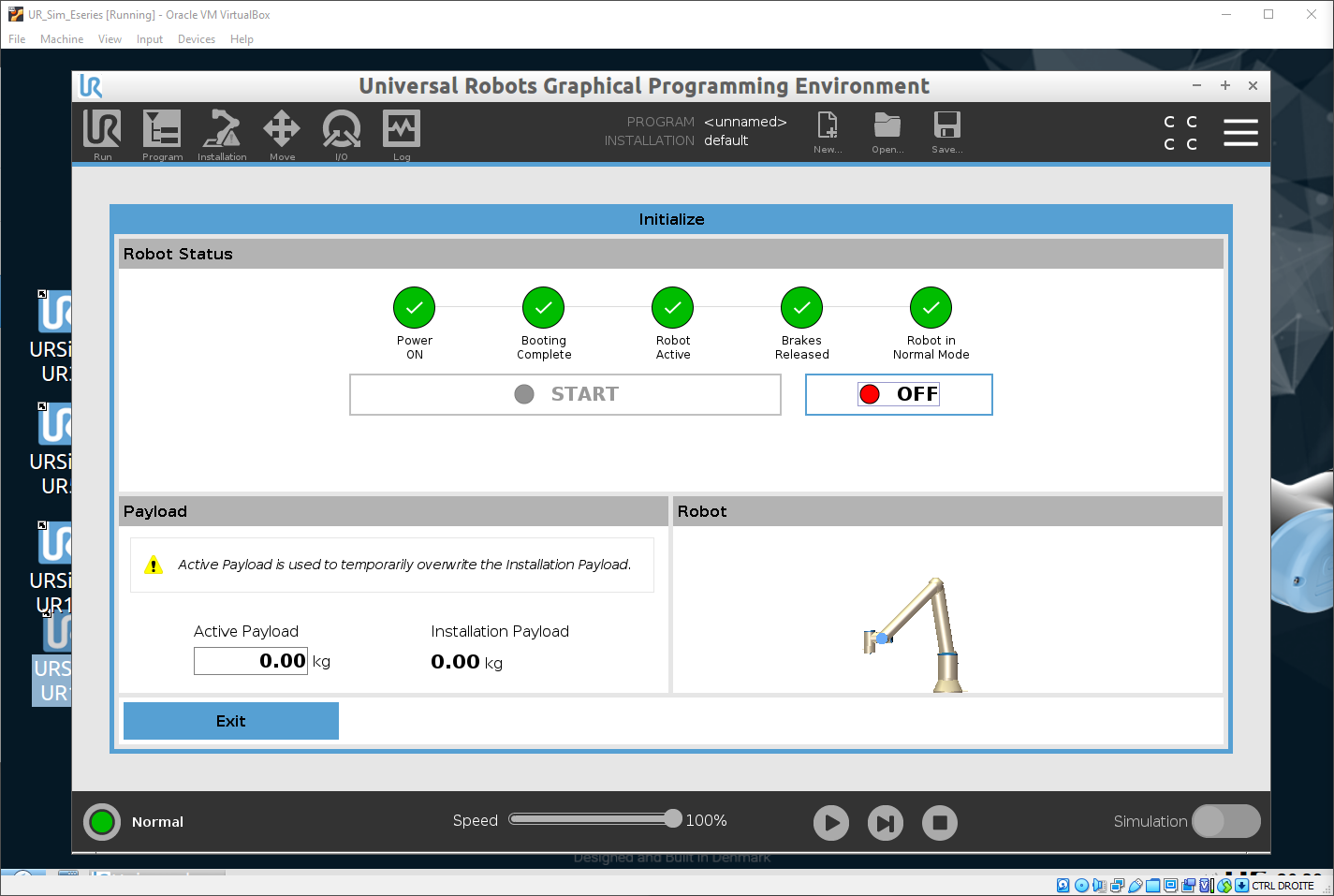
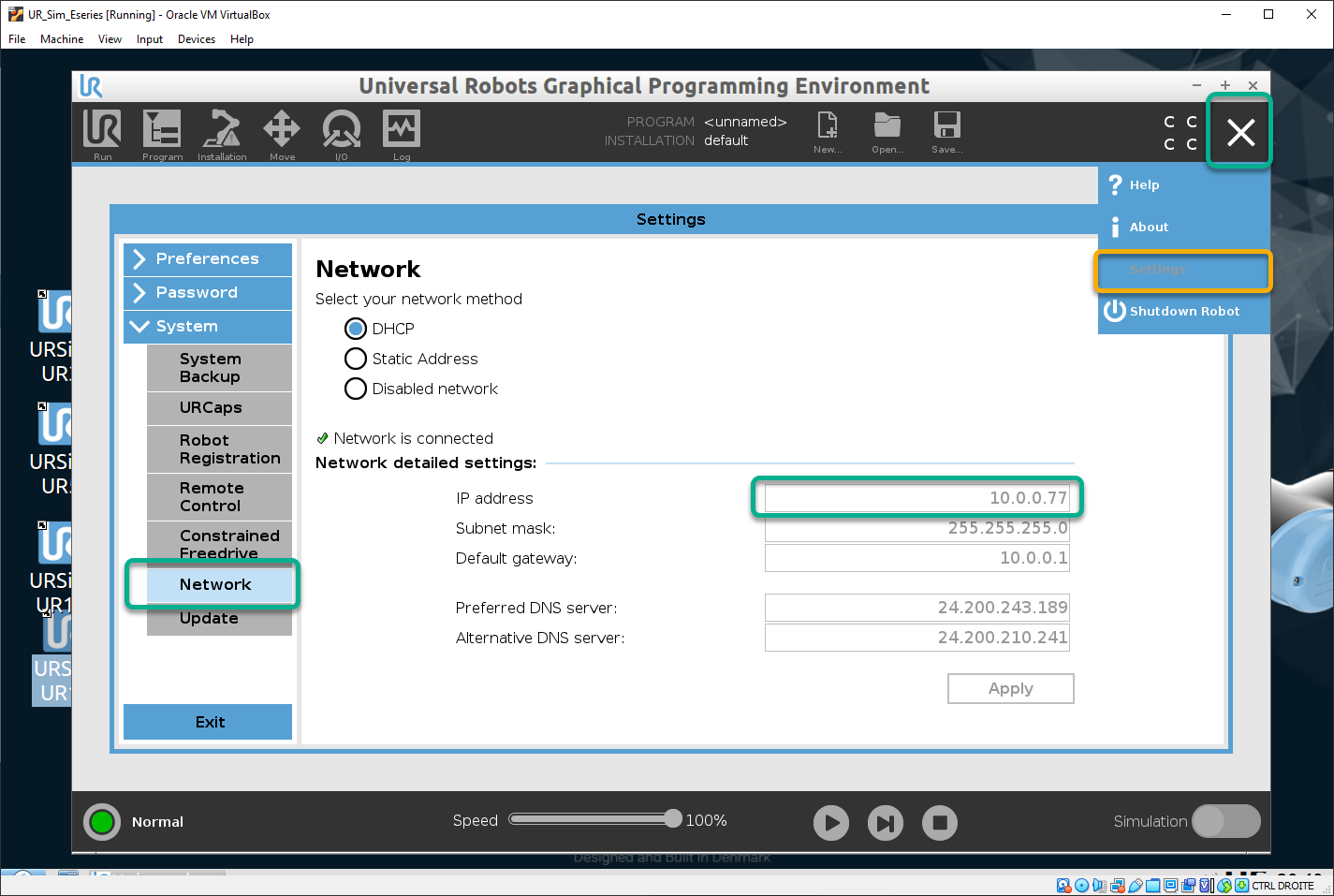
6.读取模拟器IP地址。
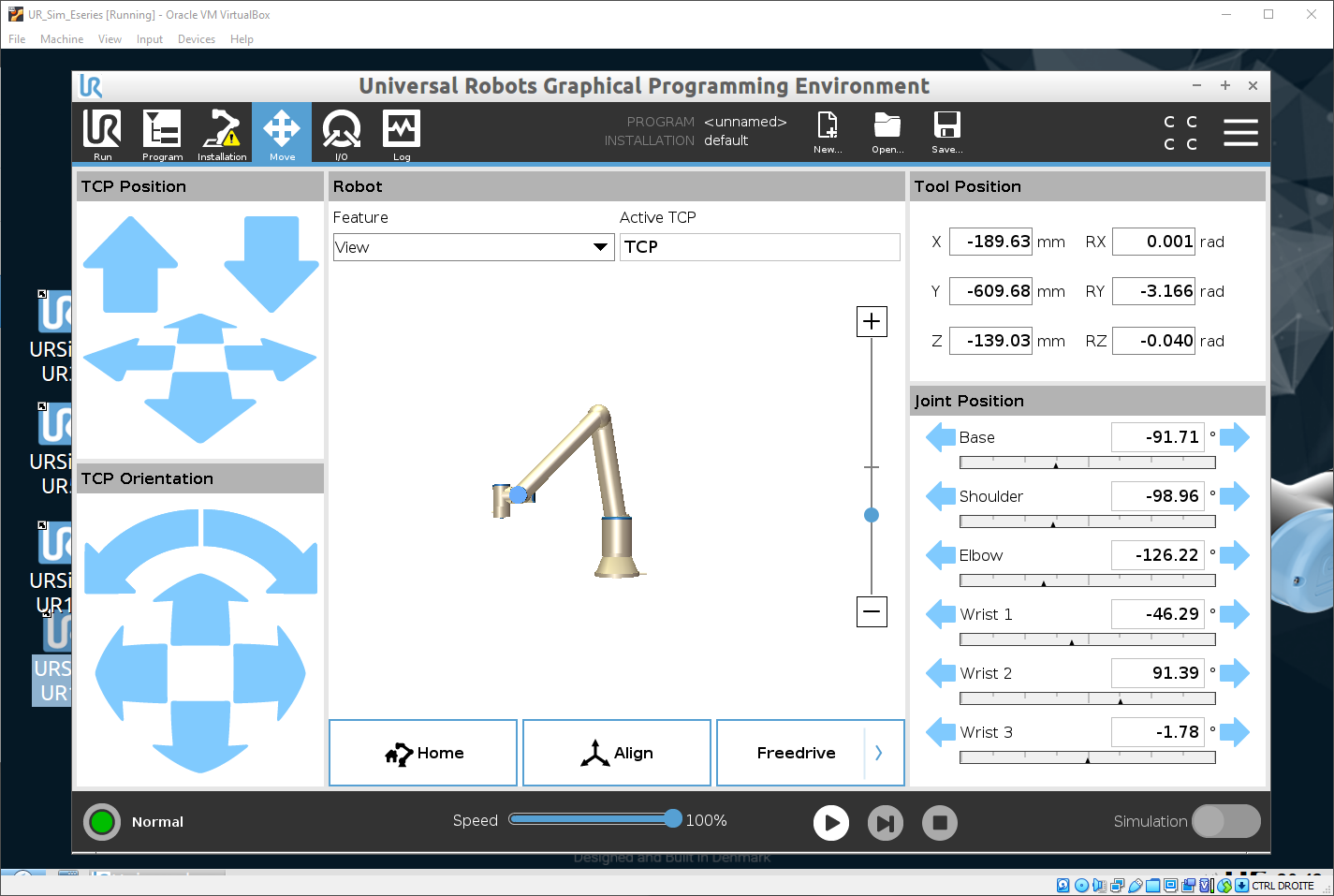
7.进入URSim的"Move"窗口。
8.在RoboDK工作站中打开相同的UR模型。
9.选择: Connect➔ConnectRobot。
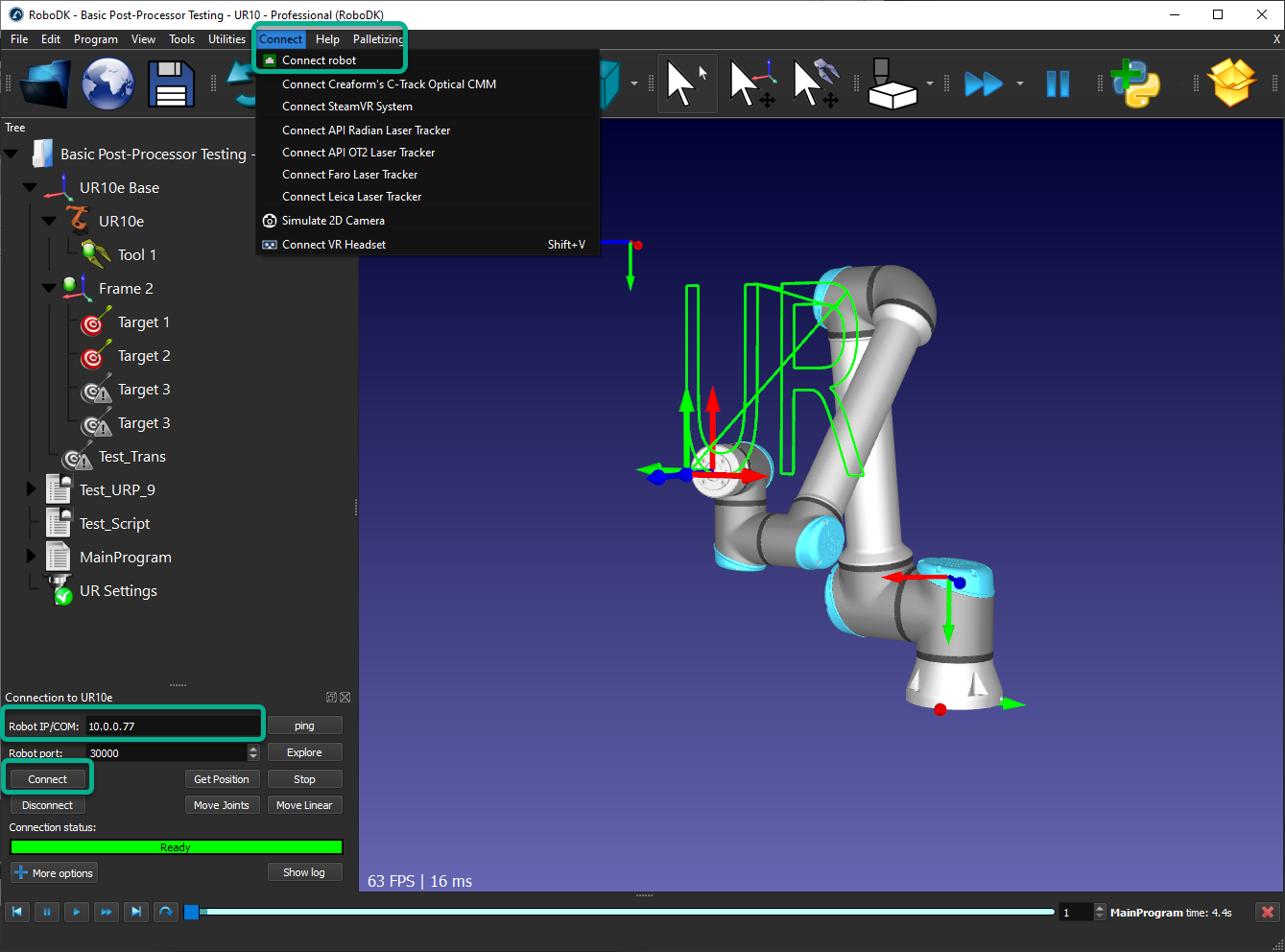
10.输入URSimIP地址,然后点击:Connect。
11.使用"Get Position",获取URSim机器人的位置,并将其应用于RoboDK。
12.使用"Move Joints",将URSim机器人移动到RoboDK机器人的位置。
13.右键单击RoboDK程序,选择"Run on robot"和"Run",即可同时在RoboDK和URSim中运行程序。