Windows
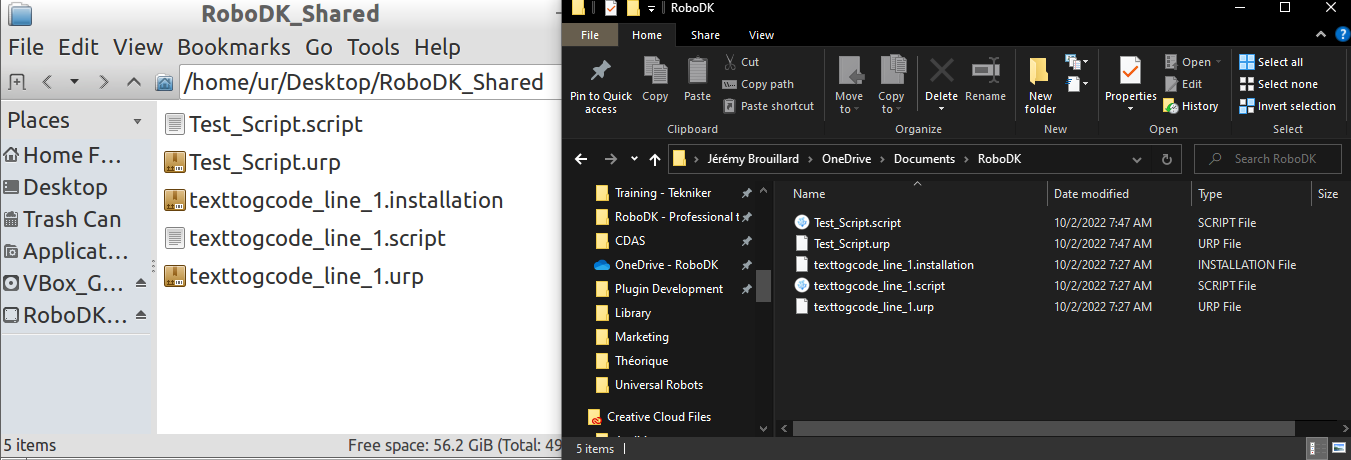
你可以选择在Windows电脑和模拟控制器之间设置共享文件夹,以便轻松传输程序文件。
请按照以下步骤将RoboDK程序文件夹映射到模拟UR机器人控制器中的新文件夹:
1.本节介绍如何在Windows和URSim之间建立共享文件夹以传输程序。
2.打开URSim的虚拟机。
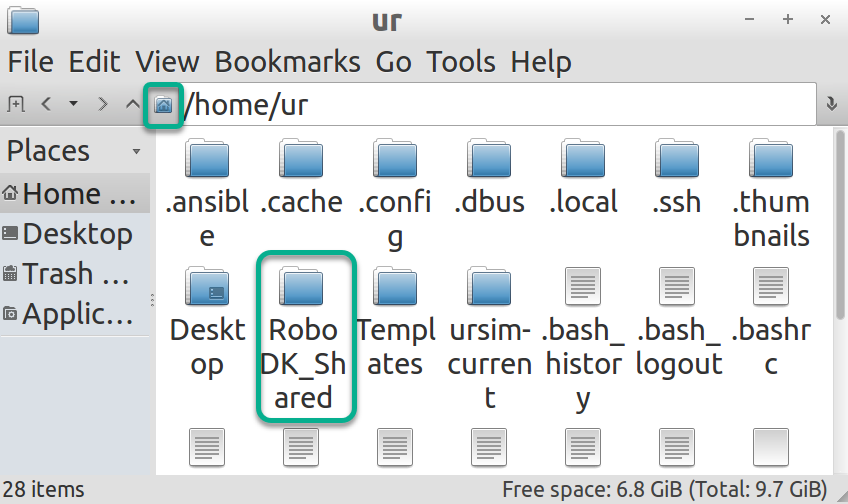
3.在Linux Ubuntu系统中创建一个名为“RoboDK_Shared”的文件夹,路径为“/home/ur/”。
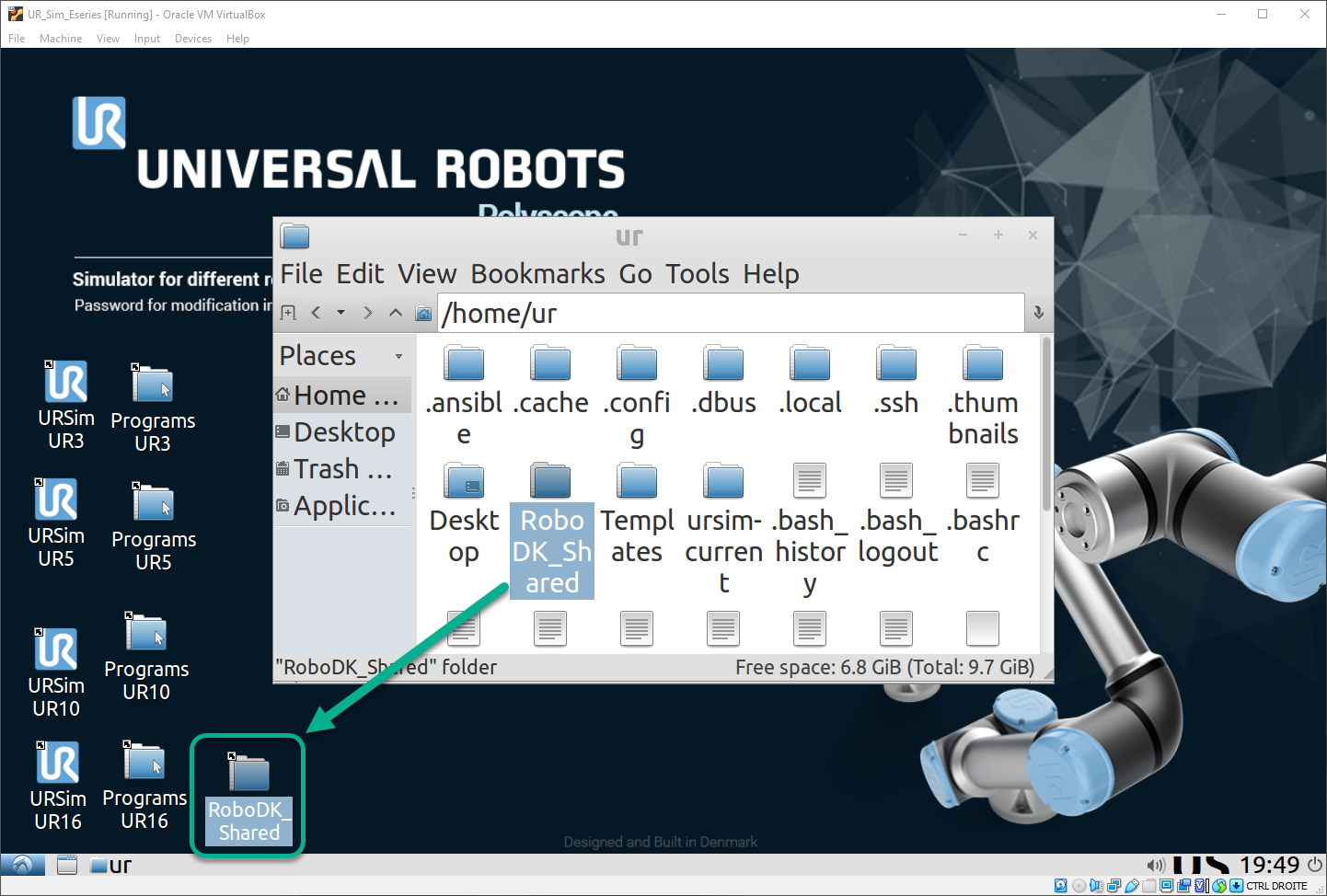
4.通过拖放“RoboDK_Shared”文件夹到桌面,创建桌面快捷方式。
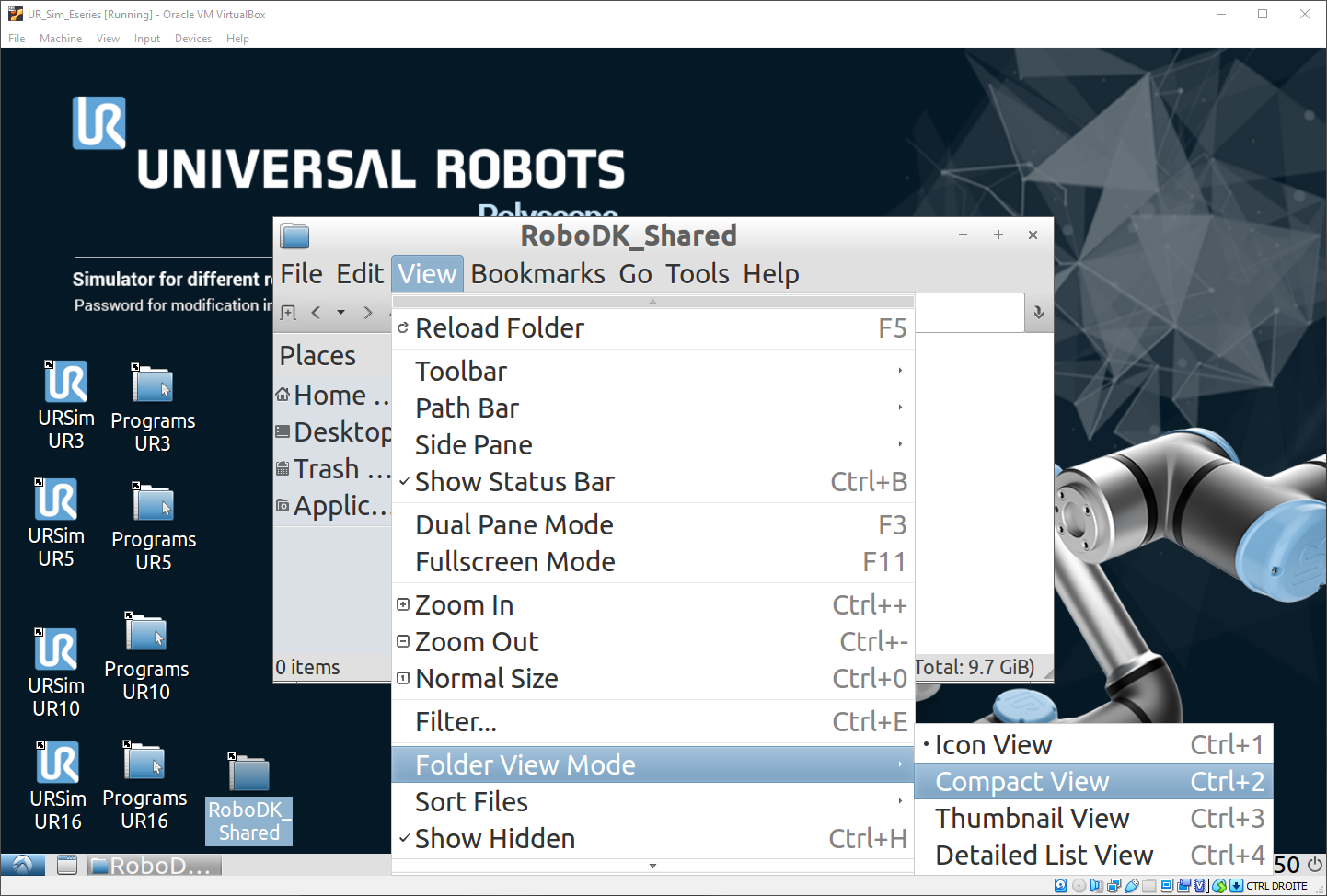
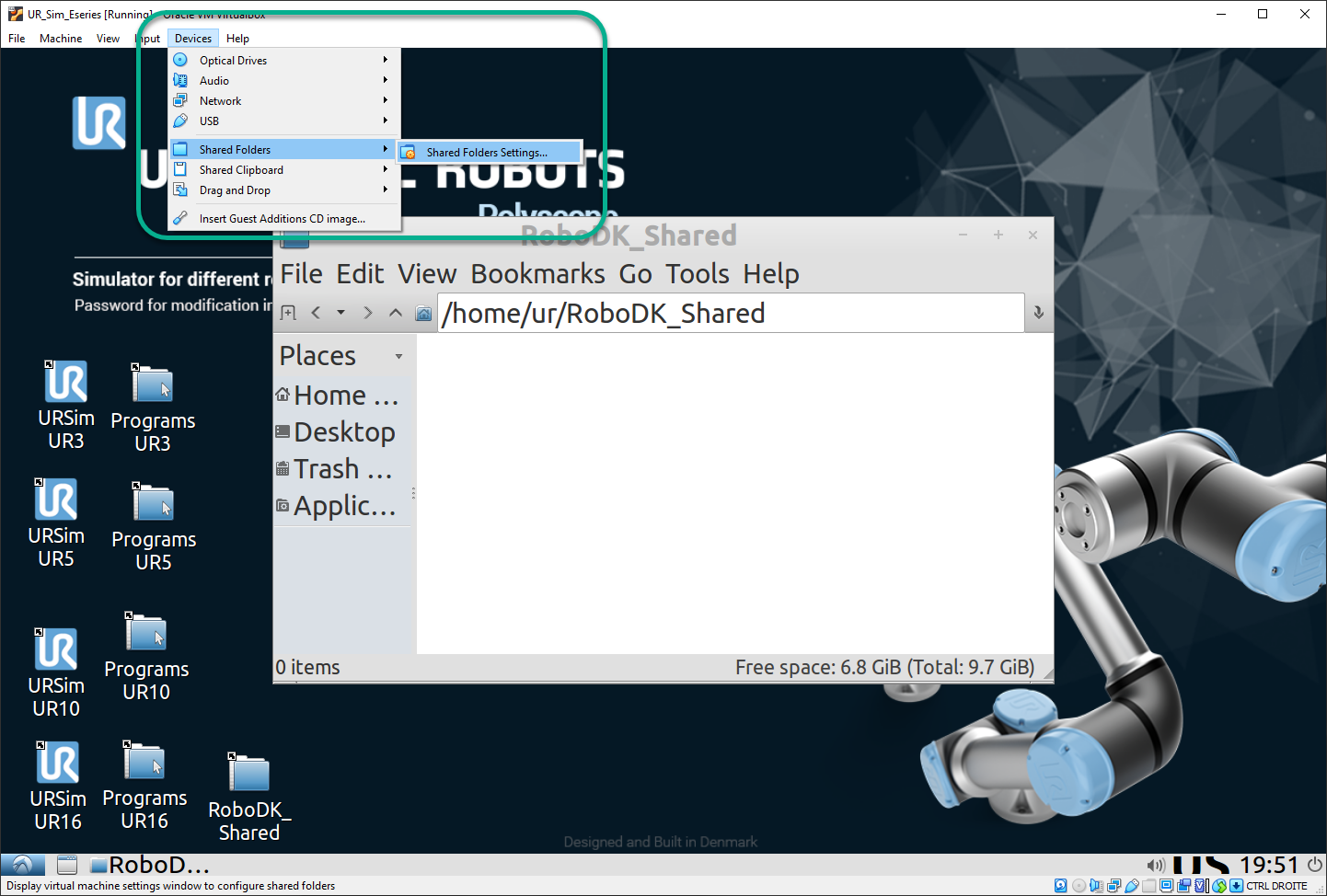
5.双击打开:RoboDK_Shared.
6.选择:View➔Folder View Mode➔Compact View.
7.从VirtualBox窗口的顶部菜单中选择: Devices➔Shared Folders➔Shared Folders Settings.
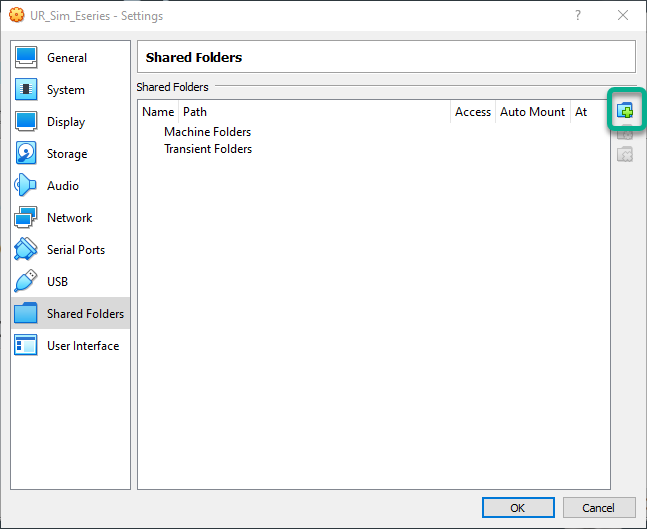
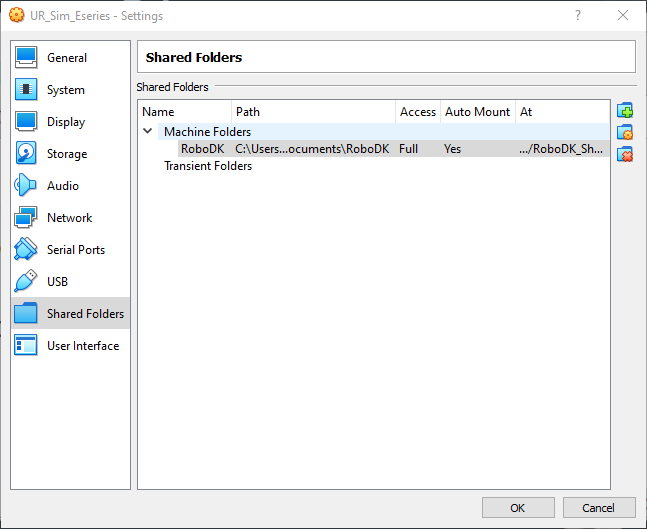
8.使用下图所示按钮添加新的共享文件夹。
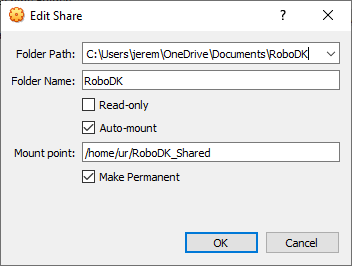
9.选择Windows中共享文件夹的路径(可使用计算机上的任何文件夹)。
10.选中:“Auto-mount” 和“Make Permanent”.
11.Mount point:/home/ur/RoboDK_Shared
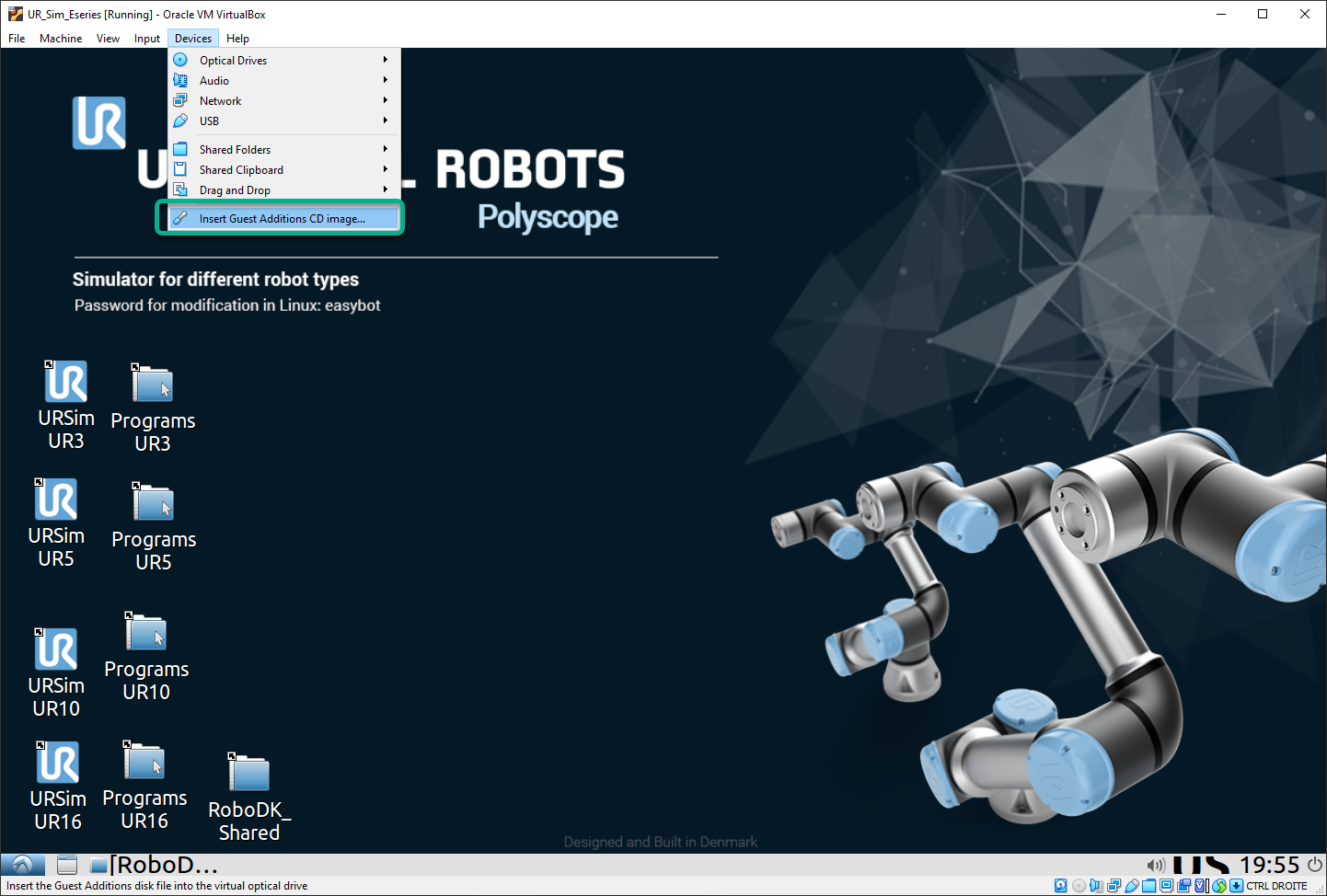
12.从VirtualBox顶部菜单中选择:Devices➔Insert Guest Additions CD Image。
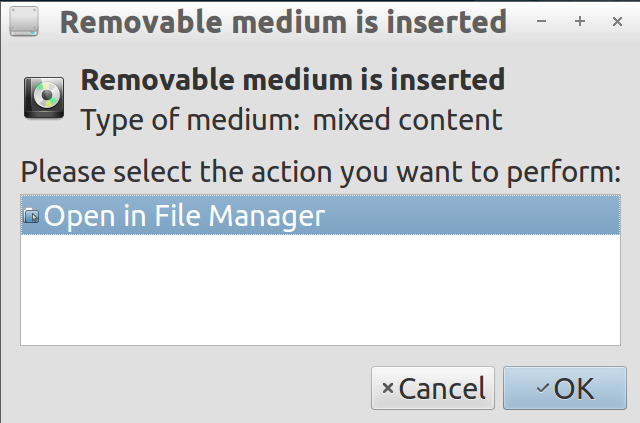
13.选择" Open in File Manager",然后按"OK"。
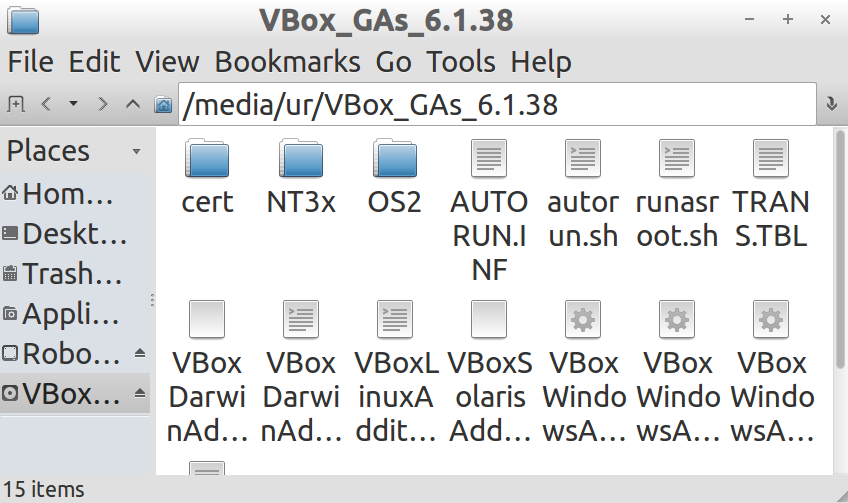
14.打开文件夹:/media/ur/VBox_Gas_6.1.38(VBox版本可能有所不同)。
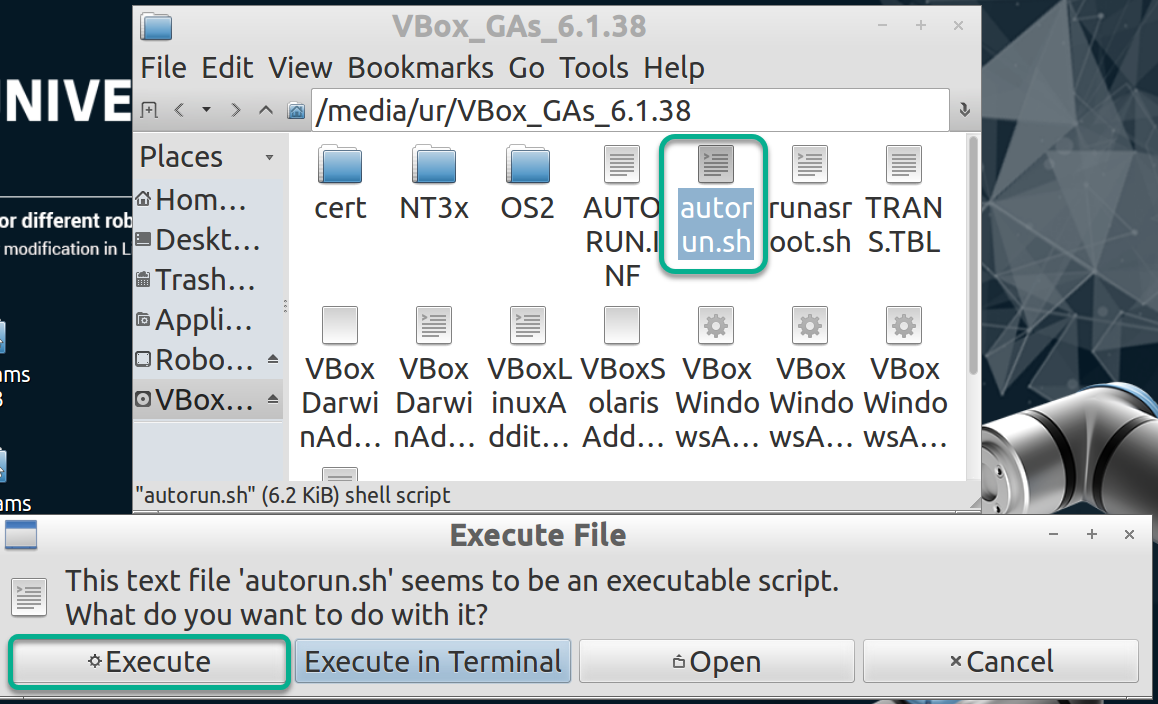
15.双击"autorun.sh"文件并选择"Execute"(密码为"easybot")。脚本运行可能需要一点时间。
16.重新启动虚拟机器。
Note:请确保使用Linux Start menu➔Logout➔Reboot,或关闭虚拟机并选择Send the shutdown signal.选项重新启动。
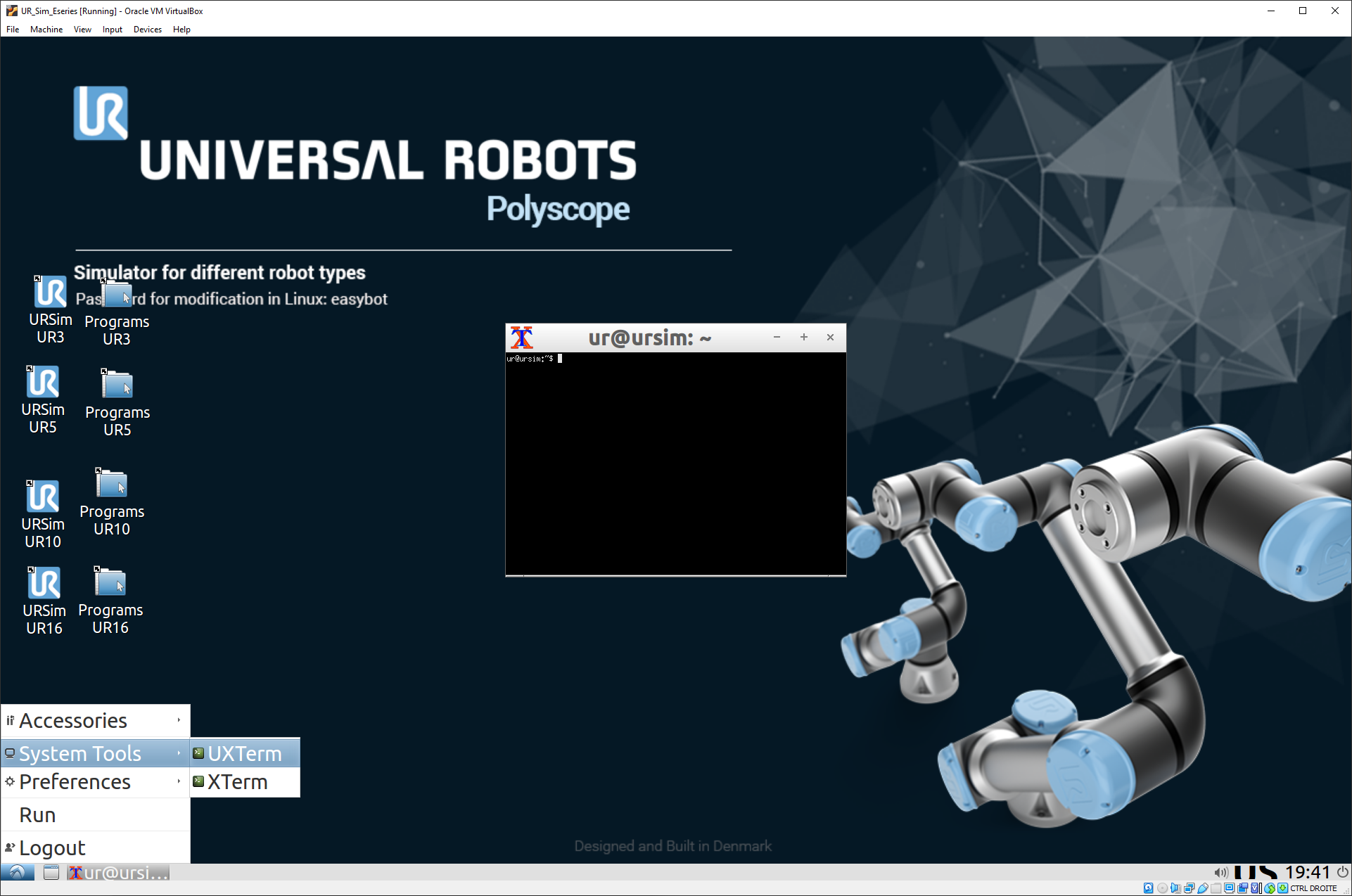
17.打开终端:选择: Start button➔System Tools➔UXTerm。
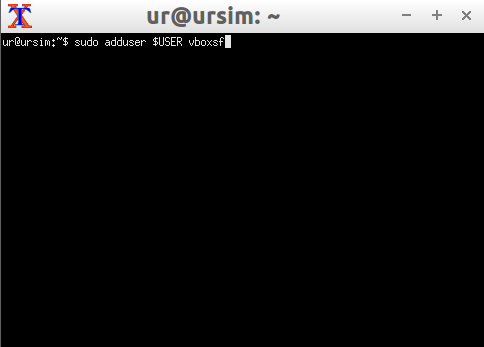
18.在终端中键入:sudo adduser $USER vboxsf,然后按回车键。
19.重启VM。
20.如果你在Windows共享文件夹中用RoboDK生成了新文件,可以在虚拟机共享文件夹" RoboDK_Shared"中按 “View” → “Reload Folder” 或按"F5"键。