提示与技巧
本章节介绍一些有用的技巧,以便你更有效地使用RoboDK软件。
缩小/放大参考系 (-/+)
拥有合适大小的参考坐标系有助于抓取正确的坐标系、目标、工具或机器人,并将其移动到所需位置。
直接按一次或多次减号键 (-) 或加号键 (+) 可分别使参考坐标系变小或变大。
Tip:更多信息详见参考坐标系章节。
Video: https://www.youtube.com/watch?v=q-Uy1jvI-Co&t=0s&index=2&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich
重命名 (F2)
选择工作站中任何项目,如物体、参考坐标系或机器人,按 F2 键重新命名。
Video:https://www.youtube.com/watch?v=NyBUutbRD3M&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=3
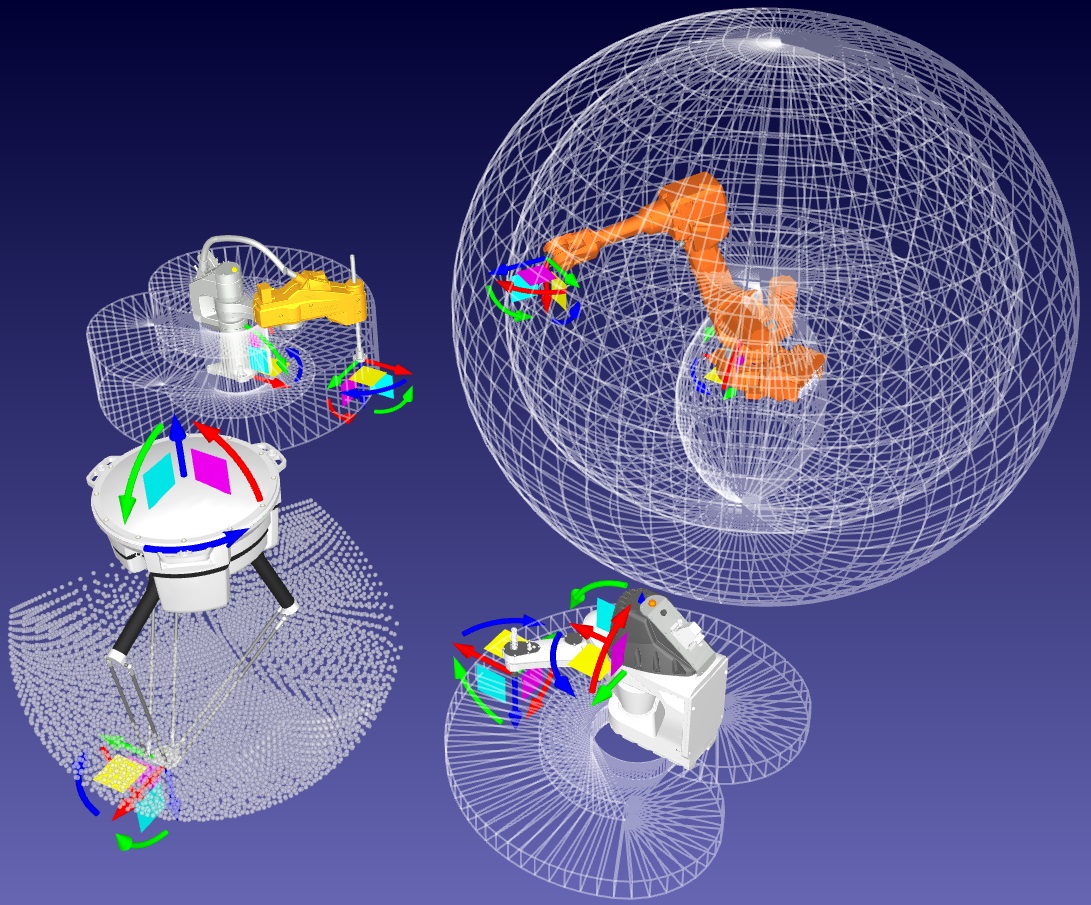
显示/隐藏机器人工作空间 (*)
可以快速显示机器人的工作空间,以评估其可达性。通过显示工作空间,你能够确保零件的位置相对于机器人的尺寸是合理的。双击某个机器人并选择显示当前工具的工作空间。否则,默认情况下将显示机器人手腕的工作空间。
按星号键 (*) 可显示或隐藏机器人工作区。
Video:https://www.youtube.com/watch?v=mQiOkiBDGcI&index=4&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich
最近打开的文件(Ctrl+1)
按下 Ctrl+1 可以加载上次打开或保存的文件。你还可以在文件菜单中访问最近打开或保存的文件。
Video:https://www.youtube.com/watch?v=sZsC53UndwU&index=5&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich
侧窗口工作站
你可以将工作站树显示为侧窗口。选择 "工具"-"选项",然后将 "显示树行特征"设置为 "侧窗口(不透明)"。如果你要处理大型物体或复杂的台站,这种布局可能更合适。
Video:https://www.youtube.com/watch?v=wTsJozezS-w&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=6
显示/隐藏项目 (F7)
选择一个或多个物体,按 F7 键使其隐形。再按一次 F7,它们就会转为可见。
Tip:按住 Ctrl 键可以在树形图或屏幕中选择多个物体。
Video:https://www.youtube.com/watch?v=MuVjIkWPv1Y&index=7&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich
显示/隐藏文本 (/)
选择 / 键(正斜杠)可以显示或隐藏屏幕上的文字。
Video:https://www.youtube.com/watch?v=ToMAUOsF07I&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=8
移动参考系(Alt)
按住Alt 键可移动参考坐标系、机器人、目标或物体。你可以在参考坐标系下放置一个或多个物体,以表示物体或参考坐标系相对于机器人的位置。
Tip:更多信息查看参考坐标系章节。
Video:https://www.youtube.com/watch?v=nqKs5KcJSrQ&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=9
移动机器人工具(Alt+Shift)
按住 Alt + Shift 键可移动机器人工具 (TCP)。机器人程序将自动更新。
Tip:更多信息请参阅机器人工具(TCP)章节。
Video:https://www.youtube.com/watch?v=aA1UHu2QeGM&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=10
重新排列树中的项目
在工作站内进行拖拽操作,即可重新排列工作站的项目。你可以通过鼠标右键拖拽对象来实现。
Tip:更多信息查看参考坐标系章节。
Video:https://www.youtube.com/watch?v=z3d7k9H_528&index=11&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich
重新排列树中的项目但不移动它们
你可以在不改变项目绝对位置的情况下重新排列树状结构中的项目。只需按住Shift键的同时拖放树状结构内的项目即可实现。
你也可以右键单击目标,通过"改变坐标系(按住Shift+拖动)"选项。
Tip:更多信息查看参考坐标系章节。
Video:https://www.youtube.com/watch?v=vDa4SvnJZLA&index=12&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich
更改工作站大小
移动鼠标滚轮时按住Ctrl 键可更改树的大小。你还可以在 "工具 "➔ "选项 "菜单中指定文本、图标和工具栏的大小。
Video:https://www.youtube.com/watch?v=4cJNar776fA&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=13
示教目标点 (Ctrl+T)
你可将机器人移动至特定位置后按下Ctrl+T创建目标点,系统将同时记录当前机器人的关节空间与笛卡尔空间位置。
右键点击新目标点可指定优先采用关节轴数据或笛卡尔坐标。
Tip:更多信息请查阅入门指南。
Video:https://www.youtube.com/watch?v=jbf8PprOT4I&index=14&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich
修改机器人目标 (F3)
你可以选择目标或运动指令,然后按F3 键修改机器人目标。你可以选择示教新位置或手动输入新坐标。
Tip:更多信息请查阅界面章节。
Video:https://www.youtube.com/watch?v=ghBYySeAHXU&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=15
示教表面上的目标点
你可以选择 "程序-示教表面上的目标点",在曲面上选择点时创建新目标。默认情况下,目标将与曲面呈法线方向。你还可以通过左侧面板上的设置修改工具方向。
Tip:更多信息请查阅入门指南。
Video:https://www.youtube.com/watch?v=ZUja5mZT1KM&index=16&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich
在表面移动机器人目标 (Alt+Shift)
按住Alt+Shift键可在保持目标贴合物体表面的同时移动它。若仅按住Alt键,则可自由移动目标而不受物体表面约束。
Video:https://www.youtube.com/watch?v=A9BD4QTEFyc&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=17
更改机器人构型
你可以选择目标点并按F4键切换机器人构型。工业机器人能以不同构型到达同一位置。确保起始构型正确非常重要,有助于避免程序运行中出现奇异点、轴限位或碰撞问题。
Video:https://www.youtube.com/watch?v=pZ1mlxD0v5Q&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=18
检查机器人程序的状态 (F5)
选择一个程序并按F5 键,检查程序路径是否存在问题。RoboDK将验证该程序并显示诸如机器人奇异点或轴限位等问题。
你也可以选择Shift+F5 来检查碰撞。请确保在 "工具-碰撞地图"(Shift+X)中设置正确的碰撞地图,并指定在碰撞检查过程中要包含的物体相关性。
Video:https://www.youtube.com/watch?v=E-Y7R-Y0SdI&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=19
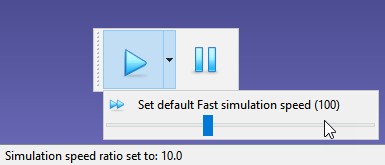
加快仿真(按住空格键)
按住空格键可以加速机器人仿真。你也可以选择工具栏上的播放按钮。RoboDK默认以实际速度 5 倍的比率模拟机器人程序。空格键可将这一比率加速到100。
你还可以选择下拉箭头来更改默认的正常/快速速度。
Video:https://www.youtube.com/watch?v=5CEpnSRItCM&index=20&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich
生成机器人程序 (F6)
在工作站中选择一个或多个程序,然后按F6 键生成机器人程序。如果不选择任何程序,RoboDK将自动生成工作站中所有可用的机器人程序。
Video: https://www.youtube.com/watch?v=iiF5_ZUIbkI&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=21
导出仿真(Ctrl+E)
准备好程序后,右键单击程序并选择导出仿真...,即可生成 3D HTML 或 3D PDF 仿真程序。
Tip:更多信息请参阅机器人程序。
例如
●UR上漆机器人
Video:https://www.youtube.com/watch?v=Vuq_hD2AZPw&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=22
向机器人发送程序 (Ctrl+F6)
你可以将机器人连接到计算机,直接从 RoboDK 向机器人发送程序。选择连接➔ 连接机器人,然后输入机器人 IP。然后,右击你的程序,选择发送程序到机器人。程序将生成并自动传输到机器人。
该选项使用 FTP 传输或其他专用协议,具体取决于机器人控制器。这些协议可以是 FTP、套接字通信或串行连接。
Tip:更多信息请参阅机器人程序。
Video: https://www.youtube.com/watch?v=WOMiEsIO_xM&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=23
发送程序到机器人
你可以将机器人连接到计算机,直接从 RoboDK 移动机器人。选择连接➔ 连接机器人,然后输入机器人 IP。然后,选择连接,使用机器人驱动器建立通信。
你可以右击任何机器人程序,激活 "在机器人上运行 "选项。然后,双击程序,真实机器人就会与模拟机器人一起移动。
该选项使用专用驱动器连接。这样就可以对机器人进行在线编程和适当的调试。
Tip:更多信息请参阅机器人驱动器。
显示机器人运动轨迹 (Alt+T)
你可以按Alt+T 显示机器人运动的轨迹。你还可以在工具➔轨迹菜单中更换轨迹样式。
Tip:更多信息请查阅入门指南。
Video:https://www.youtube.com/watch?v=Wb6ToEJVYg0&list=PLjiA6TvRACQcNitucNzKjV9_V3UFnSich&index=24