Navigation offcanvas
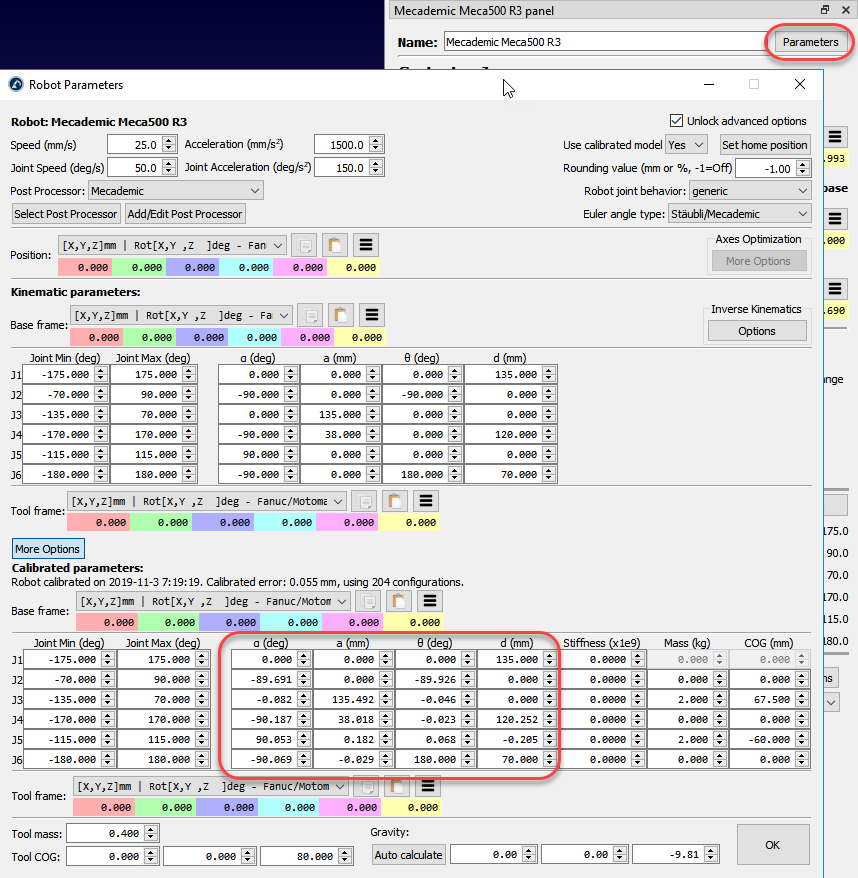
机器人校准后,你可以在参数菜单中访问校准参数。某些机器人控制器允许修改某些机器人参数。
Note:RoboDK 使用 Denatit-Hartenberg 修改约定。确保使用所有选定/校准参数。
Important: 更新机器人控制器参数时,应确保不会生成过滤程序。