高精度离线编程
使用 RoboDK 校准机器人后,我们可以选择激活精确运动学,右键点击机器人,选择使用准确运动学模型。
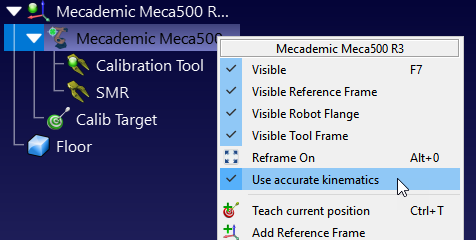
如果精度处于活动状态,我们将看到一个绿点;如果精度处于非活动状态,我们将看到一个红点。
建议使用此选项,以获得最佳精度结果。在 RoboDK 中激活机器人精度选项后,RoboDK 生成的所有程序都将自动过滤。这意味着,所有笛卡尔坐标都将稍作修改,以补偿机器人的误差。
如果你打算将机器人用于机器人加工、根据 NC 文件对机器人进行编程或使用 RoboDK 支持的任何 CAD/CAM 插件,这是最适合的选项。
Important:在生成程序时,请确保程序的第一个动作是关节动作,以保证准确性。
Important:生成程序后,请确保不要更改机器人配置。
Note:应确保工具中心点 (TCP) 和参考坐标系已在 RoboDK 中校准和定义(与过滤前实际设置中的值相匹配)。