坐标系标定技术
使用 RoboDK TwinTrack,你可以探测和定位坐标系(或参考坐标系),从而定位机器人工作区中的物体。
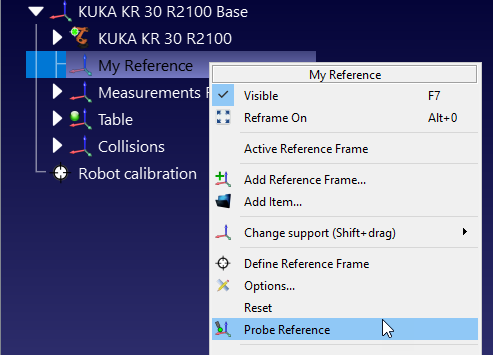
右键点击坐标系,选择 "Probe Reference"。
Tip: 如果没有自定义参考坐标系,请务必添加新的参考坐标系连接到机器人底座上(选择:程序➔添加参考坐标系)。
然后,你应按以下顺序探究 3 点:
1.原点的第一点。
2.沿着正 X 轴的第二个点。
3.沿着正 Y 轴的第三个点。
通过正确设置坐标系,你可以对机器人进行远程编程。例如,如果你有一个正确定义的夹具,当你想为一个新部件编程时,你只需在办公室或家里就可以完成,甚至无需靠近机器人。
Video:如何使用 RoboDK TwinTrack 创建坐标系:https://youtu.be/IP2UMXQk-nY?t=32。