动态物体曲线示教
如果测量系统支持同时跟踪多个物体,则可以在移动物体上创建曲线、目标和坐标系。操作步骤与静态物体相同。
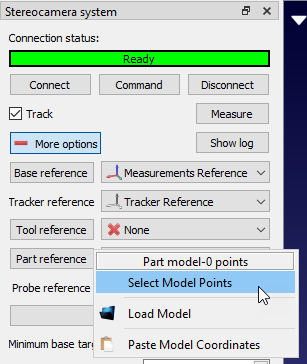
主要区别在于需要实时跟踪移动物体(使用跟踪器或反射目标)。例如,如果使用 Creaform C-Track 测量系统,则应在零件参考部分指定模型,并将其链接到所代表的坐标系。
需要在 RoboDK 中建立坐标系层级依赖关系,这样你就可以定义相对于移动目标的新坐标系。
这种零件编程方法可能不如静态零件编程准确,动态示教精度通常比静态模式低30-40%。
Note:建议缩短取样时间,以获得更准确的结果。
Video:动态曲线示教实例(Creaform HandyPROBE):https://youtu.be/EcIcLnLeOm8?t=28。