离线编程
你可以在没有真实机器人的情况下使用示教功能。这意味着,在使用真正的机器人之前,你可以仅使用测量系统离线模拟机器人并为其编程。
你只需要一个具有明确坐标系的零件作为参考。
准备好测量系统和工件后,可以按照以下步骤定义测量设备的坐标系:
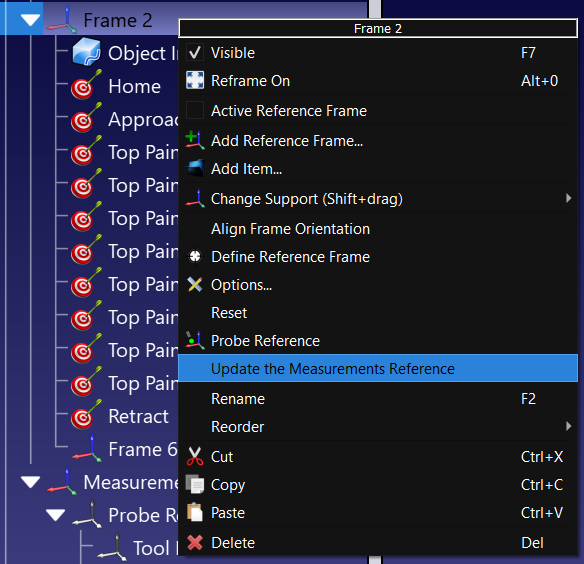
1.右键单击工件的坐标系(或夹具坐标系)。
2.选择:Update the Measurements Reference。
3.按照屏幕上的说明,依次示教原点、X+点、Y+点完成坐标系标定。
测量系统将相应更新,然后你就可以继续示教点、曲线或其他坐标系了。