参考坐标系校准
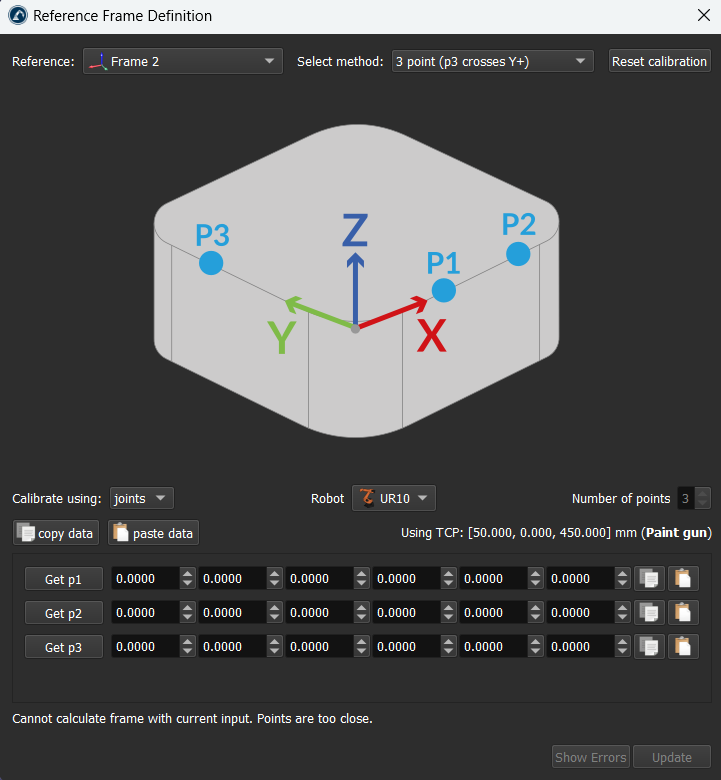
在菜单栏中选择:实用程序➔定义参考系来校准参考坐标系。可以使用不同的方法设置参考坐标系。在图中的示例中,参考坐标系由三个点定义:点 1 和点 2 定义 X 轴方向,点 3 定义 Y 轴正方向。
Important:建议在校准参考坐标系之前使用关节目标并激活机器人精度,因为机器人手臂的精度将有助于更好地定义参考坐标系。
Note:有关参考坐标系校准的更多信息,可以参考通用操作章节。
在菜单栏中选择:实用程序➔定义参考系来校准参考坐标系。可以使用不同的方法设置参考坐标系。在图中的示例中,参考坐标系由三个点定义:点 1 和点 2 定义 X 轴方向,点 3 定义 Y 轴正方向。
Important:建议在校准参考坐标系之前使用关节目标并激活机器人精度,因为机器人手臂的精度将有助于更好地定义参考坐标系。
Note:有关参考坐标系校准的更多信息,可以参考通用操作章节。