安装要求
使用 TwinTrack 工具需要安装 RoboDK TwinTrack 插件,并搭配一个测量系统。
硬件要求如下:
1.一个或多个工业机械臂。
2.6自由度测量系统。支持的测量系统包括:
a.HTC Vive Trackers (SteamVR)
b.Full Virtual Reality kit (SteamVR)
c.具有6自由度功能的激光跟踪器,支持 RoboDK 驱动器
d.Creaform C-Track
e.OptiTrack Camera system (推荐4台PrimeX13)
Note:TwinTrack 许可证不包括兼容的测量系统。RoboDK 不生产也不销售测量系统。
Important:HTC Vive追踪器或虚拟现实基站并非为精确测量设计。要获得最佳精度,请使用激光跟踪仪等专业计量系统。
1.必须安装 RoboDK 软件,并获取相应的TwinTrack 许可证。
2.如果要自动运行机器人程序,你需要为机器人控制器配备兼容的机器人驱动程序。
3.安装TwinTrack RoboDK插件:
a.下载TwinTrack插件(.rdkp 文件)。
b.双击文件安装插件,并在RoboDK 中打开。
c.如果在工具栏看不到 TwinTrack选项,那么在主菜单中选择:工具➔Add-in Manager,然后双击TwinTrack,即可在工具栏看到TwinTrack。
Note:RoboDK插件需要在插件里Enable启用它。双击TwinTrack rdkp 文件时,此插件应自动加载。如未自动加载,你需要返回Add-in Manager章节找到相关信息。
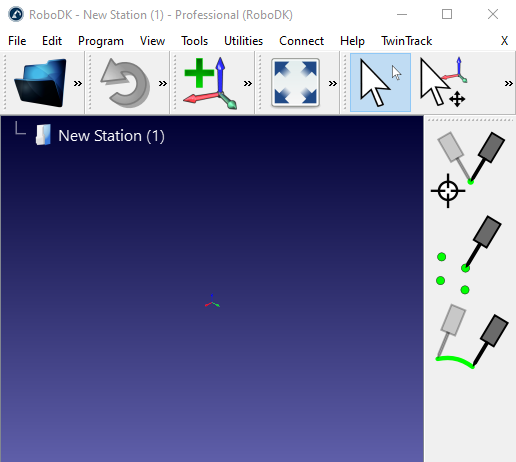
Note: TwinTrack菜单和工具栏应如图所示自动显示。你可以通过点击:工具➔插件,并双击加载项的加载标签来显示或隐藏TwinTrack加载项(或其他加载项)。
使用SteamVR与HTC Vive追踪器配置
本节将指导配置SteamVR。可通过自制工具配合追踪器手动模拟加工动作,再由机器人复现相同轨迹。
RoboDK TwinTrack支持所有SteamVR兼容设备,包括v1-v3版本的HTC Vive追踪器,包括HTC Vive追踪器v1至v3版本。
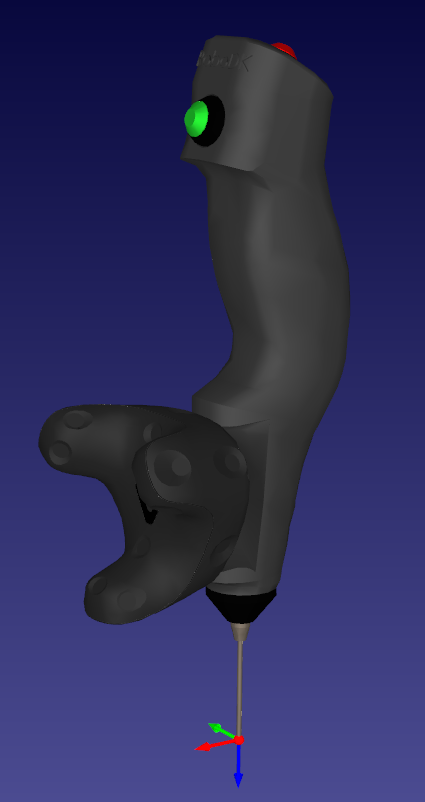
Note:HTC Vive追踪器是使用RoboDK TwinTrack最具性价比的解决方案。一套完整系统包含两个追踪器和2个Valve Index基站,价格可控制在2000美元以内。可将追踪器安装在定制探针或工具上,通过手动操作模拟制造流程。
Important:虽然可将HTC Vive追踪器用于工业场景的机器人仿真编程,但该系统最初为游戏设计,不保证精度。如需高精度结果,请改用激光跟踪仪等专业设备。
Important:自2024年4月起,RoboDK提供独立的SteamVR安装包,无需安装Steam或修改SteamVR配置文件:https://robodk.com/downloads/private/SteamVR-TwinTrack-v1.27.5.zip。若你使用独立版本,可直接跳转至步骤4。
配置步骤:
1.若没有安装过Steam,那么先创建一个 Steam账户。
2.然后安装SteamVR,它属于Steam的扩展插件,可以为虚拟现实和6D追踪提供支持。
3.如果你没有或不需要VR头显,你需要这样操作:
a.打开此路径的文件,并在文本编辑器里根据要求编辑:
C:/Program Files (x86)/Steam\steamapps\common\SteamVR\drivers\null\resources\settings
default.vrsettings
设置"enable": true, (默认为false)
b.打开此路径的文件,并在文本编辑器里根据要求编辑:
C:/Program Files (x86)/Steam\steamapps\common\SteamVR\resources\settings\
default.vrsettings
并设置
"requireHmd": false, (默认为 true)
"forcedDriver":"null",(默认为空"")
"activateMultipleDrivers": true, (默认为 false)
关闭SteamVR ,然后再打开。
4.打开SteamVR并按照说明设置系统。如果你不使用VR头显,可以接受所有默认设置。
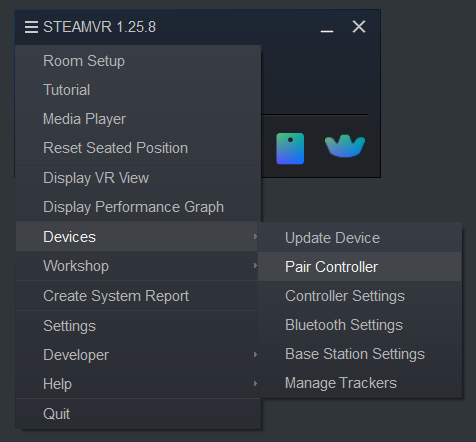
5.配对追踪器为探头:
a.按住追踪器上的电源按钮2秒钟启动(未配对时亮蓝灯)。
b.打开菜单,点击Devices➔Pair Controller
c.选择选项:HTC ViveTracker 配对成功后绿灯常亮。
若要解除连接,可按住电源键2秒,指示灯将变为蓝色(可能会闪烁)。
Important:每个追踪器需单独连接USB无线接收器。
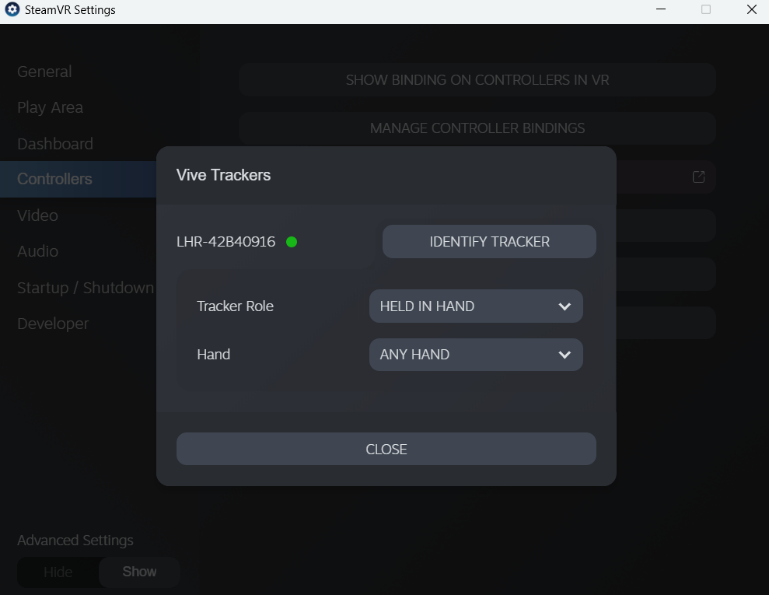
6.将跟踪器角色设置为:Held in hand。
a.在菜单中点击Settings
b.选择Controllers
c.选择Manage Trackers
d.设置Tracker Role:Held in hand
e.设置Hand:Any hand(默认设置)
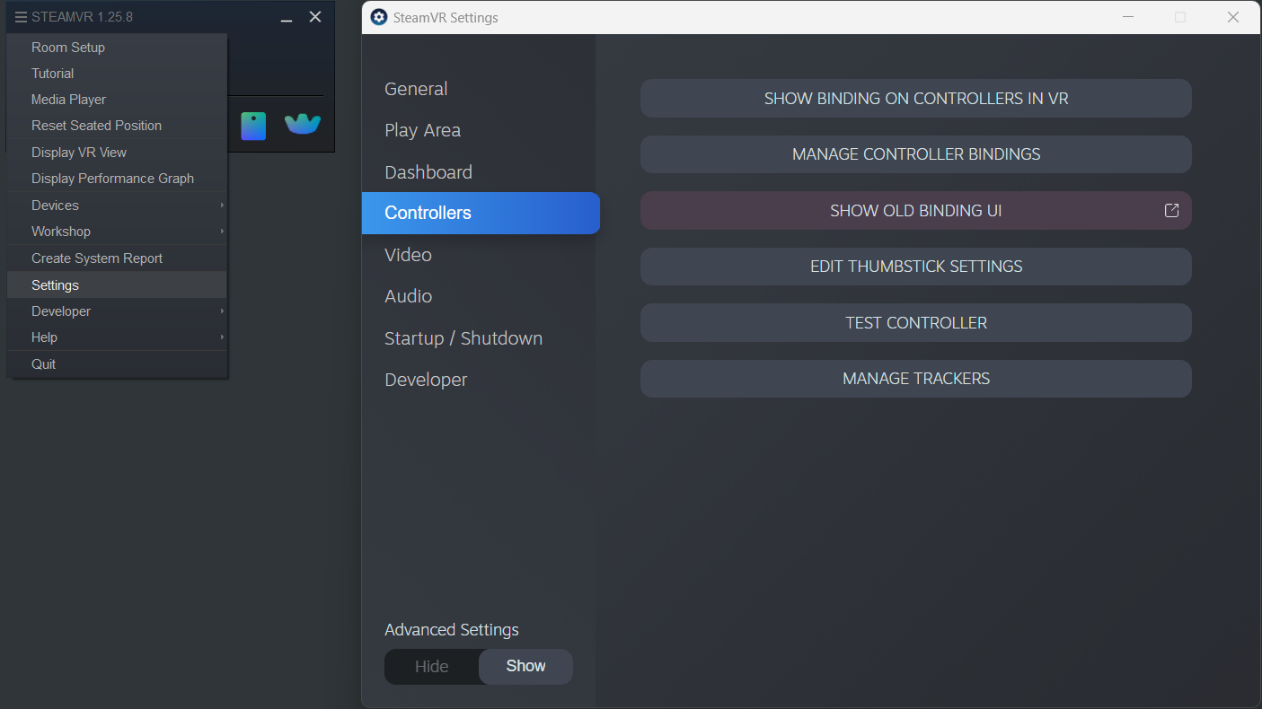
7.自定义控制器绑定设置:
a.打开SteamVR➔Settings
b.打开Advanced Settings➔Show
c.选择 Controllers
d.选择 Show Old Bindings UI
e.选择 RoboDK
f.选择Currend Controller,设置:Vive Tracker in Hand(可能已经设置过)。
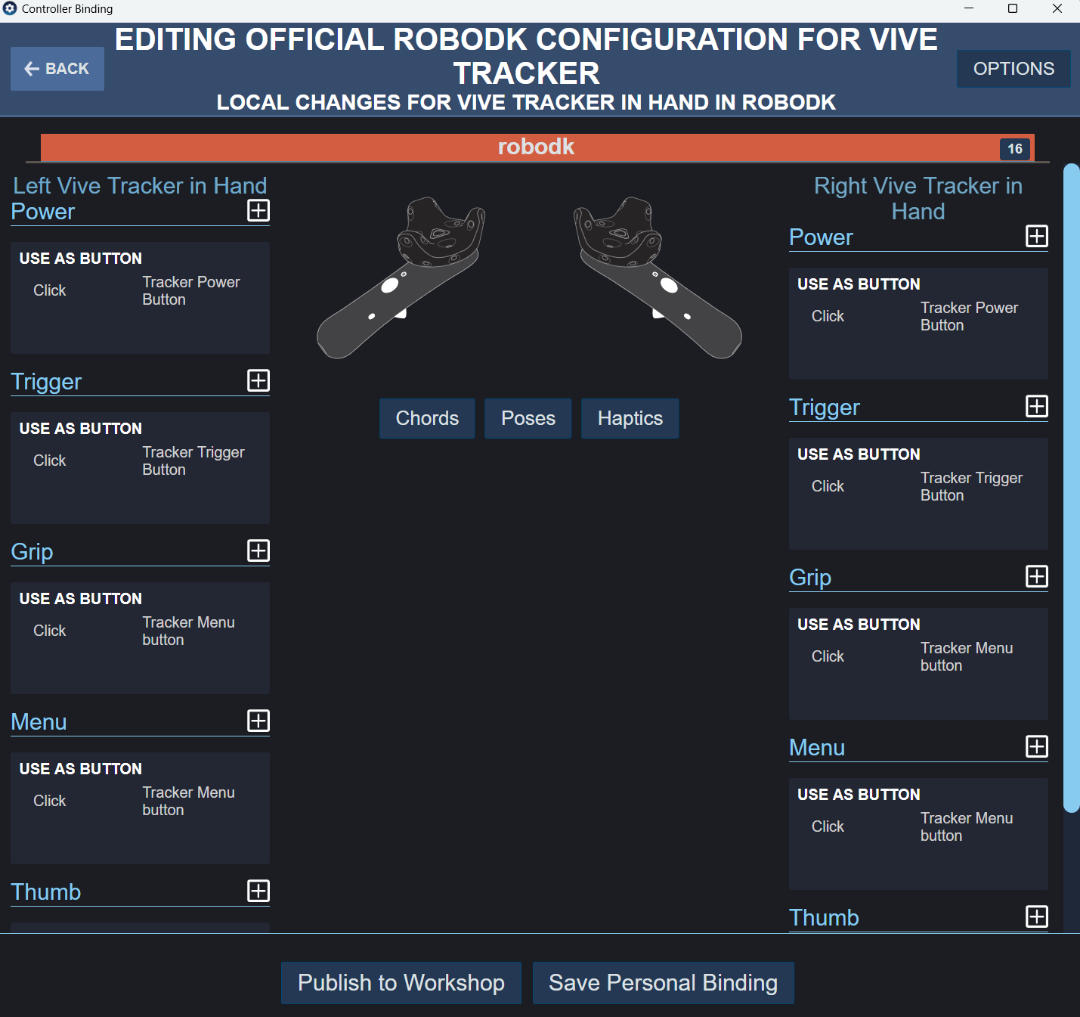
g.在当前绑定中选择Edit
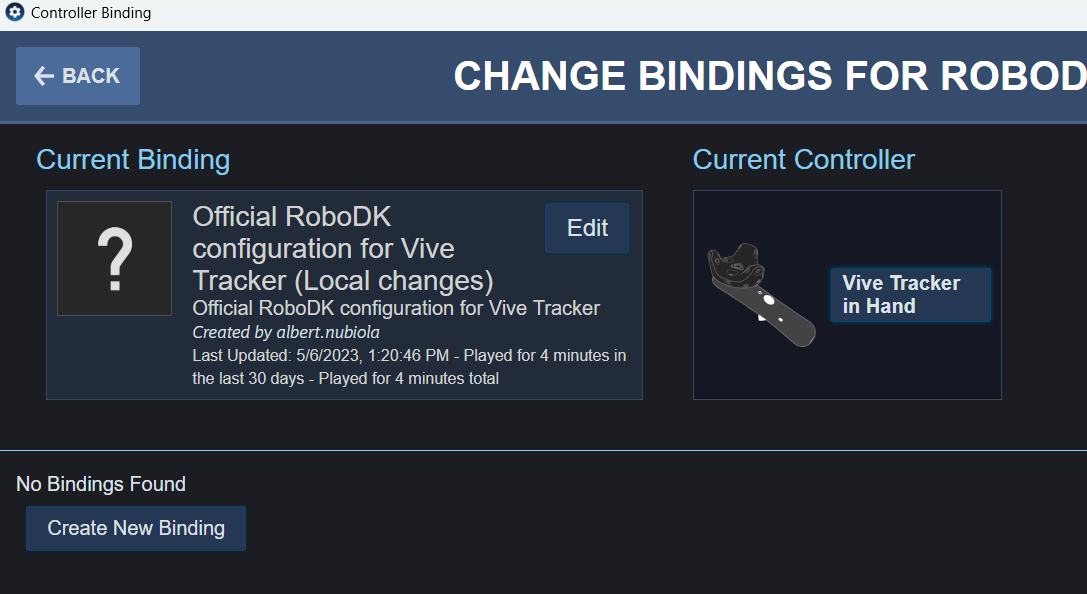
h.你应该能看到追踪器默认的绑定设置。
Tip:为了在示教目标和得分点获得最佳性能,你可以禁用以下两个选项:打开RoboDK点击:工具➔选项➔其他,取消勾选"等待渲染更新"和 "显示所有VR设置",最后确定。