设置
要使用TwinTrack系统,需在RoboDK中加载机器人模型,并连接机器人与测量系统。建议同步构建工作站3D模型(包含工具与工件模型),可有效预防碰撞风险。
8.加载机器人模型:
a.选择:文件➔ 打开机器人库。机器人库将显示在RoboDK中。
b.使用过滤器查找机器人。
c.选择 "下载",双击下载文件,RoboDK 工作站会自动加载机器人。
d.或者,直接从在线资源库(https://robodk.com/cn/library)下载机器人文件,然后用 RoboDK 打开文件(.robot 文件)。
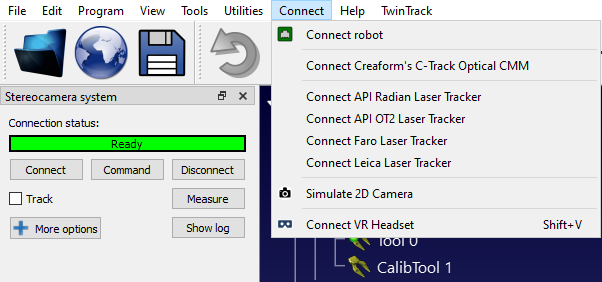
9.连接测量系统:
a.将测量系统连接到电脑。
b.选择 "连接 "并连接至测量系统。确保所需的软件也已安装。根据你使用的测量系统,你可能需要配置跟踪器的IP地址。
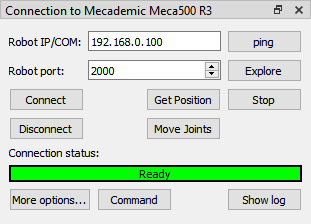
10.连接到机器人:
a.在菜单中点击:连接➔连接机器人。
b.输入机器人 IP 和端口。
c.点击:连接。
Note:某些机器人控制器需要遵循特定的设置或特定的软件选项。更多信息详见机器人驱动程序章节。