目标点示教
使用 RoboDK TwinTrack,你可以通过探头示教点手动创建机器人目标。
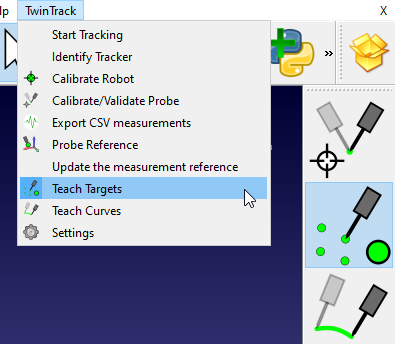
在菜单栏点击TwinTrack➔Teach Targets,启动目标示教模式。TwinTrack工具栏中也有Teach Targets按钮。
RoboDK 可根据你手的位置实时计算并显示机器人的位置。你可以轻松查看机器人可以到达的区域。
Tip:更改 TCP 的方向可改变 RoboDK 选择的机器人默认方向。
在这个模式下,每按一次测头按钮即可记录一个目标点位置。当需要生成完整程序时,按下测头的第二个按钮,RoboDK将自动进行轨迹仿真。
●测头第一按钮:记录目标点
●第二按钮:生成并仿真程序
●长按第二按钮:实际执行程序
Video:如何使用 RoboDK TwinTrack 创建目标:https://youtu.be/xiFEHs1GMdg?t=28。
Note:可通过在菜单栏中选择:TwinTrack➔ Settings更改趋近距离以及趋近和运行速度等其他设置。