RoboDK TwinTrack
TwinTrack
RoboDK TwinTrack是一个只需要通过"动作模仿"简化工业机器人编程流程的技术。它通过模仿人类动作来快速实现机器人自动化。该系统通过6D测量系统捕捉操作人员的动作轨迹,并精确复现到工业机器人上。
RoboDK TwinTrack 提供了一种通过人类动作示教机器人自动化的方式,可用于喷涂、抛光、去毛刺、点胶、焊接等多种制造场景...
使用TwinTrack示教的一个优势是,你可以用你的机器人模拟生产操作,机器人会复现相同的动作。这种机器人编程方法不需要使用 3D 模型。也不需要操作员使用计算机。这将为你节省大量时间,让你可以更快地开始机器人编程。

RoboDK TwinTrack 需要一个 6自由度测量系统和一个手持式探针或工具,这样你就可以用手模仿制造操作。
RoboDK 支持来自 50 个不同机器人制造商的600 多个机器人。这意味着你可以对 RoboDK 支持的任何机械臂进行编程。你还可以创建自己的机器人和机械装置。
利用 TwinTrack 和 RoboDK 校准工具,你可以创建高精度的机器人程序。使用良好的测量系统,位置精度可达 0.150 毫米。通常精度水平在很大程度上取决于机器人的质量和尺寸。通过使用 RoboDK 校准工具,你可以精确地创建数字孪生程序。
Video:RoboDK TwinTrack产品演示:https://youtu.be/hFHZKQNVXrM?t=30。
安装要求
使用 TwinTrack 工具需要安装 RoboDK TwinTrack 插件,并搭配一个测量系统。
硬件要求如下:
1.一个或多个工业机械臂。
2.6自由度测量系统。支持的测量系统包括:
a.HTC Vive Trackers (SteamVR)
b.Full Virtual Reality kit (SteamVR)
c.具有6自由度功能的激光跟踪器,支持 RoboDK 驱动器
d.Creaform C-Track
e.OptiTrack Camera system (推荐4台PrimeX13)
Note:TwinTrack 许可证不包括兼容的测量系统。RoboDK 不生产也不销售测量系统。
Important:HTC Vive追踪器或虚拟现实基站并非为精确测量设计。要获得最佳精度,请使用激光跟踪仪等专业计量系统。
1.必须安装 RoboDK 软件,并获取相应的TwinTrack 许可证。
2.如果要自动运行机器人程序,你需要为机器人控制器配备兼容的机器人驱动程序。
3.安装TwinTrack RoboDK插件:
a.下载TwinTrack插件(.rdkp 文件)。
b.双击文件安装插件,并在RoboDK 中打开。
c.如果在工具栏看不到 TwinTrack选项,那么在主菜单中选择:工具➔Add-in Manager,然后双击TwinTrack,即可在工具栏看到TwinTrack。
Note:RoboDK插件需要在插件里Enable启用它。双击TwinTrack rdkp 文件时,此插件应自动加载。如未自动加载,你需要返回Add-in Manager章节找到相关信息。
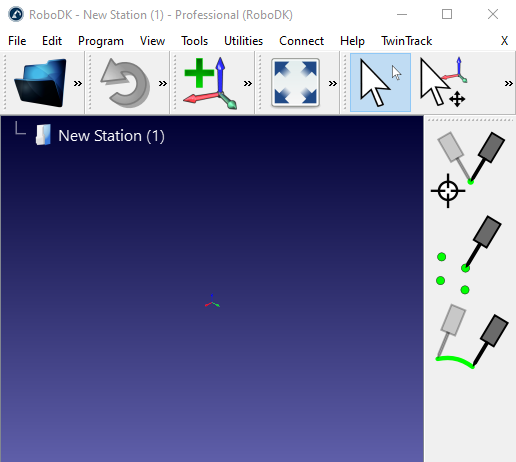
Note: TwinTrack菜单和工具栏应如图所示自动显示。你可以通过点击:工具➔插件,并双击加载项的加载标签来显示或隐藏TwinTrack加载项(或其他加载项)。
使用SteamVR与HTC Vive追踪器配置
本节将指导配置SteamVR。可通过自制工具配合追踪器手动模拟加工动作,再由机器人复现相同轨迹。
RoboDK TwinTrack支持所有SteamVR兼容设备,包括v1-v3版本的HTC Vive追踪器,包括HTC Vive追踪器v1至v3版本。
Note:HTC Vive追踪器是使用RoboDK TwinTrack最具性价比的解决方案。一套完整系统包含两个追踪器和2个Valve Index基站,价格可控制在2000美元以内。可将追踪器安装在定制探针或工具上,通过手动操作模拟制造流程。
Important:虽然可将HTC Vive追踪器用于工业场景的机器人仿真编程,但该系统最初为游戏设计,不保证精度。如需高精度结果,请改用激光跟踪仪等专业设备。
Important:自2024年4月起,RoboDK提供独立的SteamVR安装包,无需安装Steam或修改SteamVR配置文件:https://robodk.com/downloads/private/SteamVR-TwinTrack-v1.27.5.zip。若你使用独立版本,可直接跳转至步骤4。
配置步骤:
1.若没有安装过Steam,那么先创建一个 Steam账户。
2.然后安装SteamVR,它属于Steam的扩展插件,可以为虚拟现实和6D追踪提供支持。
3.如果你没有或不需要VR头显,你需要这样操作:
a.打开此路径的文件,并在文本编辑器里根据要求编辑:
C:/Program Files (x86)/Steam\steamapps\common\SteamVR\drivers\null\resources\settings
default.vrsettings
设置"enable": true, (默认为false)
b.打开此路径的文件,并在文本编辑器里根据要求编辑:
C:/Program Files (x86)/Steam\steamapps\common\SteamVR\resources\settings\
default.vrsettings
并设置
"requireHmd": false, (默认为 true)
"forcedDriver":"null",(默认为空"")
"activateMultipleDrivers": true, (默认为 false)
关闭SteamVR ,然后再打开。
4.打开SteamVR并按照说明设置系统。如果你不使用VR头显,可以接受所有默认设置。
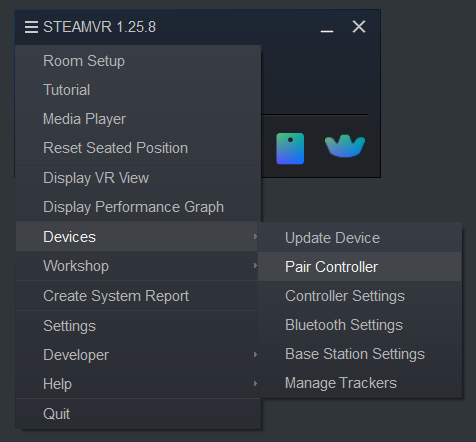
5.配对追踪器为探头:
a.按住追踪器上的电源按钮2秒钟启动(未配对时亮蓝灯)。
b.打开菜单,点击Devices➔Pair Controller
c.选择选项:HTC ViveTracker 配对成功后绿灯常亮。
若要解除连接,可按住电源键2秒,指示灯将变为蓝色(可能会闪烁)。
Important:每个追踪器需单独连接USB无线接收器。
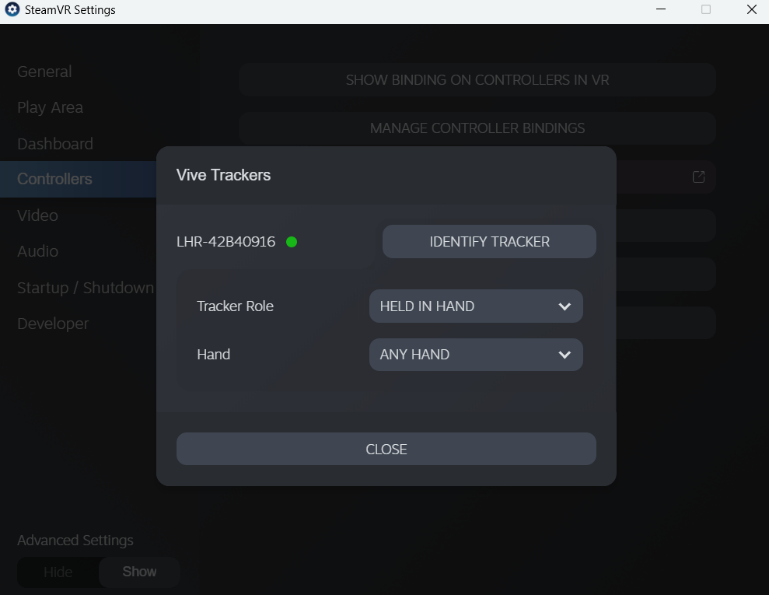
6.将跟踪器角色设置为:Held in hand。
a.在菜单中点击Settings
b.选择Controllers
c.选择Manage Trackers
d.设置Tracker Role:Held in hand
e.设置Hand:Any hand(默认设置)
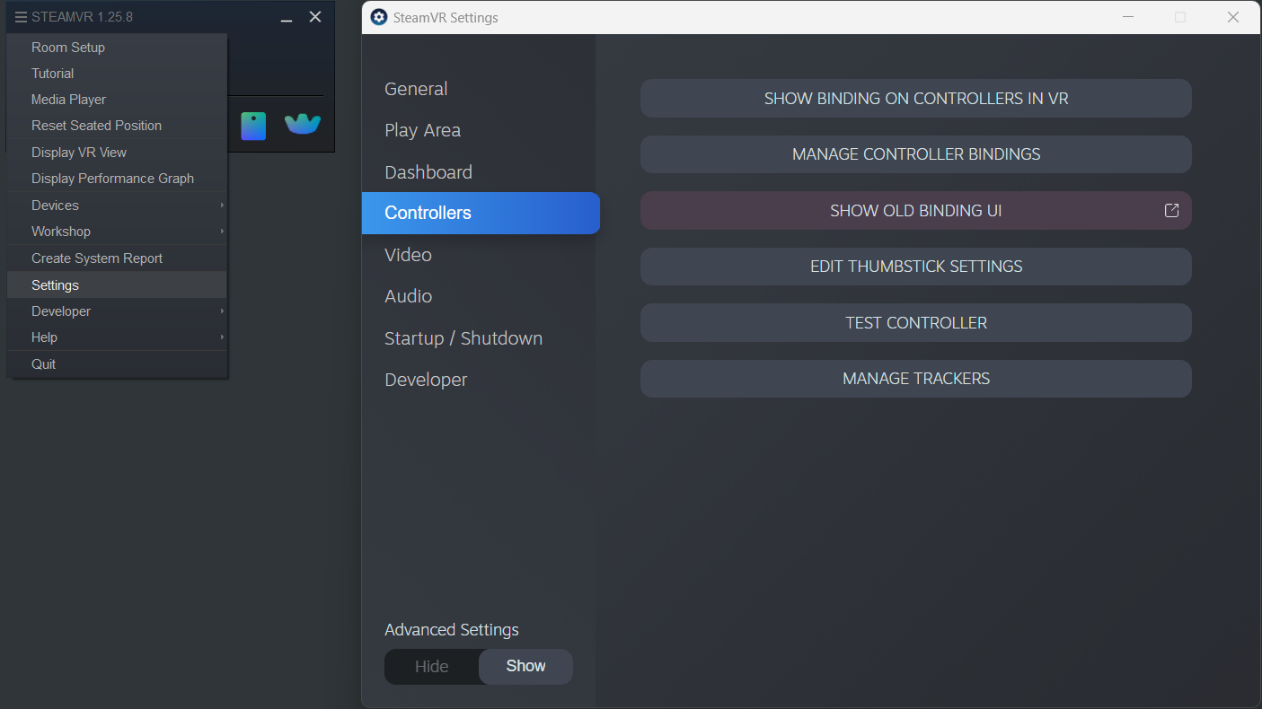
7.自定义控制器绑定设置:
a.打开SteamVR➔Settings
b.打开Advanced Settings➔Show
c.选择 Controllers
d.选择 Show Old Bindings UI
e.选择 RoboDK
f.选择Currend Controller,设置:Vive Tracker in Hand(可能已经设置过)。
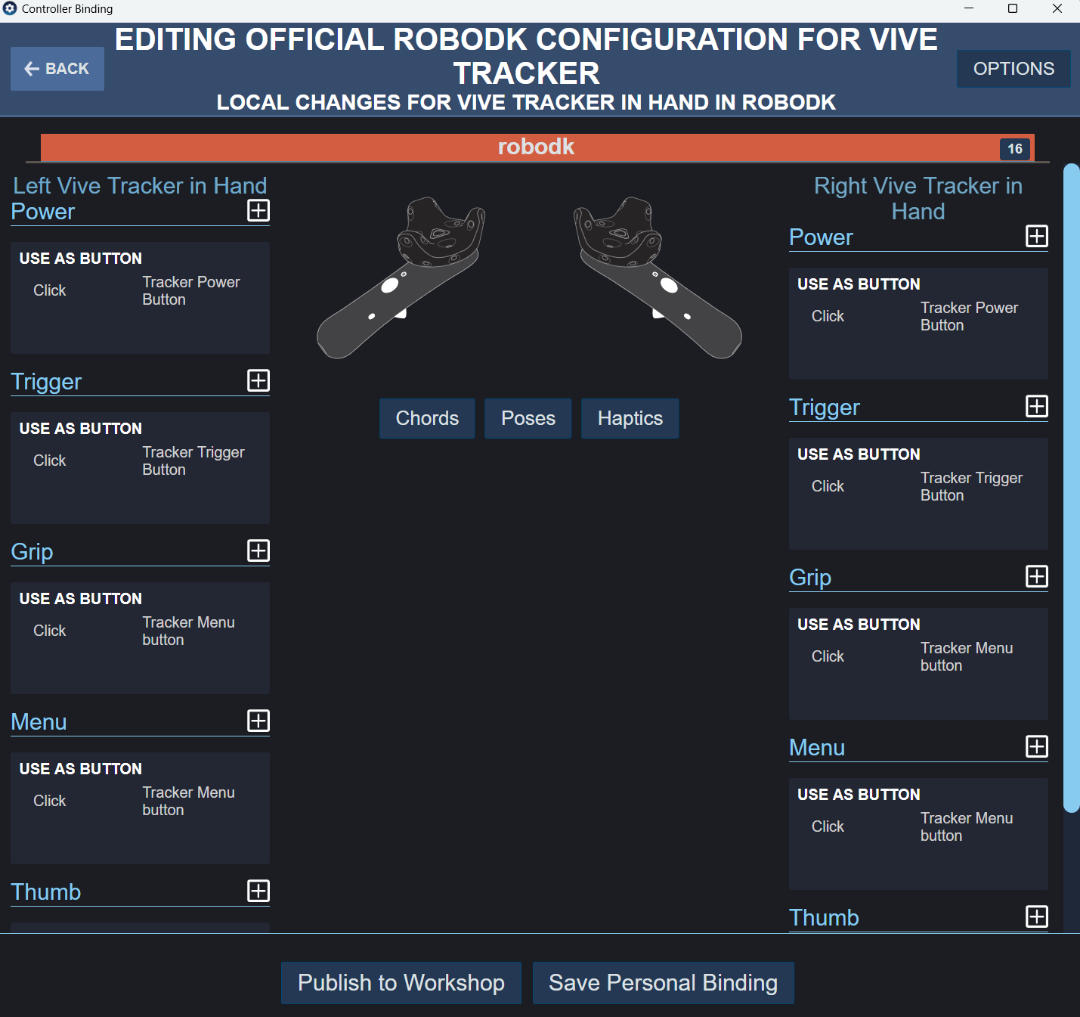
g.在当前绑定中选择Edit
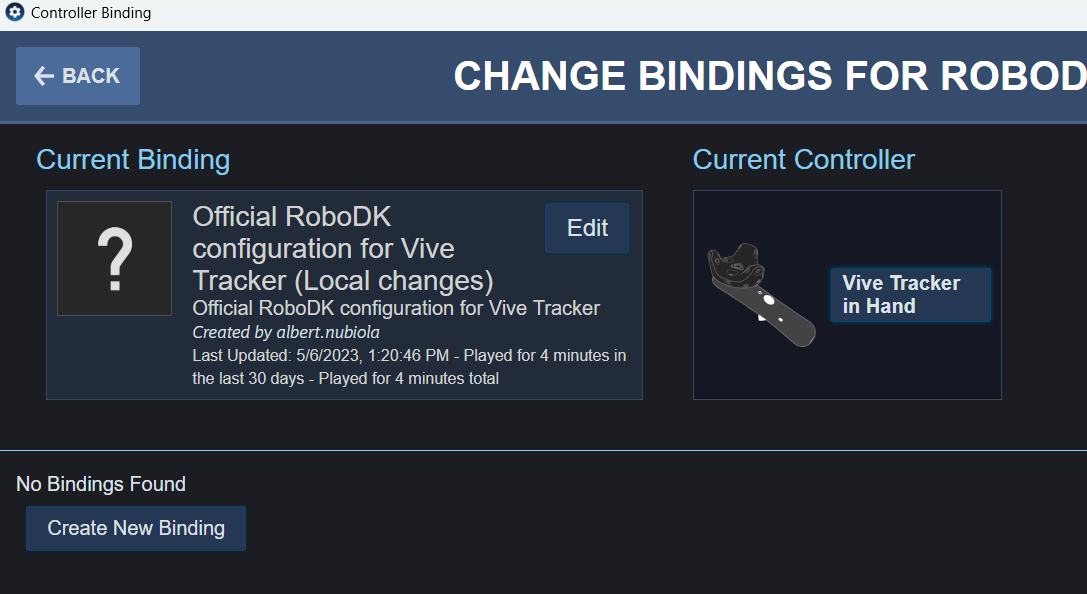
h.你应该能看到追踪器默认的绑定设置。
Tip:为了在示教目标和得分点获得最佳性能,你可以禁用以下两个选项:打开RoboDK点击:工具➔选项➔其他,取消勾选"等待渲染更新"和 "显示所有VR设置",最后确定。
设置TwinTrack
要使用TwinTrack系统,需在RoboDK中加载机器人模型,并连接机器人与测量系统。建议同步构建工作站3D模型(包含工具与工件模型),可有效预防碰撞风险。
8.加载机器人模型:
a.选择:文件➔ 打开机器人库。机器人库将显示在RoboDK中。
b.使用过滤器查找机器人。
c.选择 "下载",双击下载文件,RoboDK 工作站会自动加载机器人。
d.或者,直接从在线资源库(https://robodk.com/cn/library)下载机器人文件,然后用 RoboDK 打开文件(.robot 文件)。
9.连接测量系统:
a.将测量系统连接到电脑。
b.选择 "连接 "并连接至测量系统。确保所需的软件也已安装。根据你使用的测量系统,你可能需要配置跟踪器的IP地址。
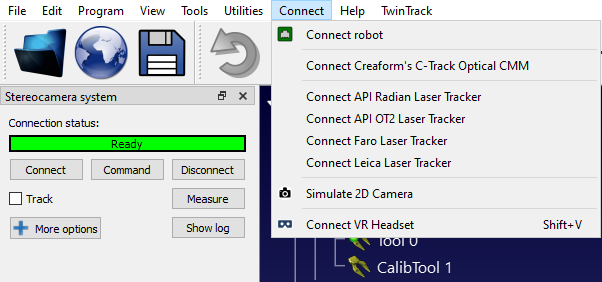
10.连接到机器人:
a.在菜单中点击:连接➔连接机器人。
b.输入机器人 IP 和端口。
c.点击:连接。
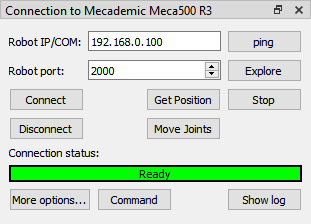
Note:某些机器人控制器需要遵循特定的设置或特定的软件选项。更多信息详见机器人驱动程序章节。
系统校准指南
本节将指导完成机器人及测头的校准流程。此校准只需执行一次,但对获取高精度结果至关重要。
开始校准前,建议加载工作单元的3D模型。这有助于在校准过程中自动避免碰撞。如果没有各组件的3D模型,你只需加载平面、立方体和球体等基本几何体来标记需要避开的区域。
机器人校准
本节介绍如何使用 RoboDK TwinTrack 和测量系统自动校准机器人。通过RoboDK TwinTrack与测量系统自动校准机器人,可使离线编程或示教再现的精度最高达0.150毫米(实际精度取决于机器人质量与规格)。
建议在构建机器人单元或进行重大修改(如更改工具的有效载荷)后执行机器人校准。这有助于获得最佳精度。
建议在开始前加载工作站3D模型,可自动规避校准过程中的碰撞风险。若无完整组件模型,可用平面/立方体/球体等基础几何体标记禁入区域。
你可以在菜单栏中选择:TwinTrack➔Calibrate robot,启动机器人校准程序。
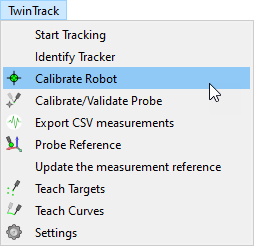
该操作将指导你校准机器人,包括自动生成用于校准和验证的点。RoboDK 可以自动生成跟踪器可见的点。
机器人校准程序需采集约200组测量数据,从机器人Home位开始。
一旦设置准备就绪,与机器人的通信也已正常建立,正常校准过程将耗时 15-30 分钟。
该系统不需要特殊的夹具或附件,只需根据跟踪器基准跟踪工具的位置。
如果因为目标不可见而错过一些测量,也没有关系。
Note: 有关如何校准机器人的详细信息,请参阅机器人校准程序。
探头校准
必须校准测头尖端以确保其精度符合公差要求。通过绕固定点移动测头完成校准:
校准探针针尖的方法是将针尖绕静态点移动。
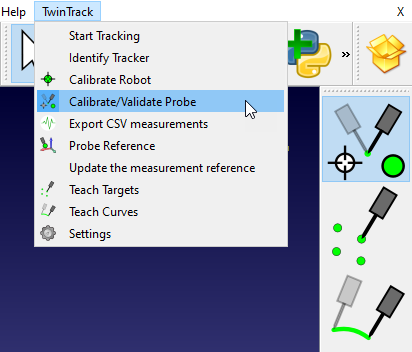
在菜单栏选择:TwinTrack➔ Calibrate/Validate Probe Tip 开始工具校准。
在本例中,由于我们使用的是 Creaform HandyProbe,因此可以使用 Creaform VXElements 软件校准探头,并使用 RoboDK 进行验证。
要验证探针的针尖,你只需在静态点周围移动,RoboDK 就会显示精度。
Note: Creaform HandPROBE 或 Leica T-Probe 等某些测头可在工具顶端提供虚拟测头,因此无需校准。
Tip:你可以选择 TwinTrack➔ Export CSV Measurements(导出 CSV 测量值)来记录测量值。
离线编程
你可以在没有真实机器人的情况下使用示教功能。这意味着,在使用真正的机器人之前,你可以仅使用测量系统离线模拟机器人并为其编程。
你只需要一个具有明确坐标系的零件作为参考。
准备好测量系统和工件后,可以按照以下步骤定义测量设备的坐标系:
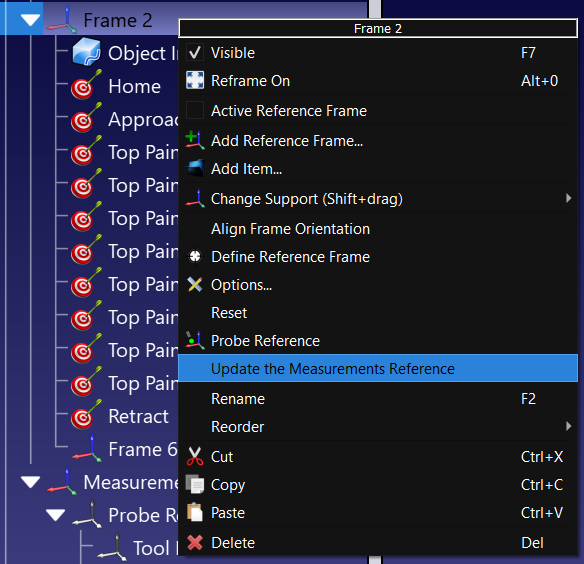
1.右键单击工件的坐标系(或夹具坐标系)。
2.选择:Update the Measurements Reference。
3.按照屏幕上的说明,依次示教原点、X+点、Y+点完成坐标系标定。
测量系统将相应更新,然后你就可以继续示教点、曲线或其他坐标系了。
目标点示教
使用 RoboDK TwinTrack,你可以通过探头示教点手动创建机器人目标。
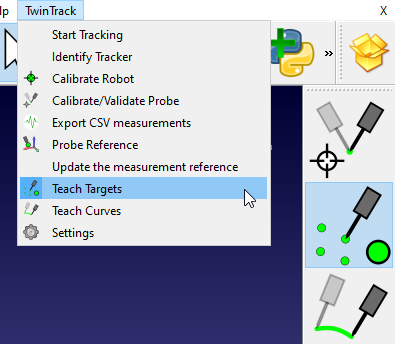
在菜单栏点击TwinTrack➔Teach Targets,启动目标示教模式。TwinTrack工具栏中也有Teach Targets按钮。
RoboDK 可根据你手的位置实时计算并显示机器人的位置。你可以轻松查看机器人可以到达的区域。
Tip:更改 TCP 的方向可改变 RoboDK 选择的机器人默认方向。
在这个模式下,每按一次测头按钮即可记录一个目标点位置。当需要生成完整程序时,按下测头的第二个按钮,RoboDK将自动进行轨迹仿真。
●测头第一按钮:记录目标点
●第二按钮:生成并仿真程序
●长按第二按钮:实际执行程序
Video:如何使用 RoboDK TwinTrack 创建目标:https://youtu.be/xiFEHs1GMdg?t=28。
Note:可通过在菜单栏中选择:TwinTrack➔ Settings更改趋近距离以及趋近和运行速度等其他设置。
曲线示教
通过RoboDK TwinTrack系统,你可以使用测头手动创建机器人运动轨迹或连续曲线路径。
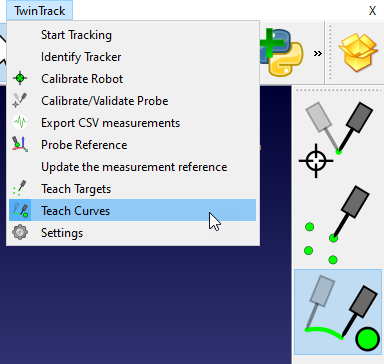
你可以在菜单栏中选择:TwinTrack➔ Teach Curves来启动示教目标模式。TwinTrack工具栏中也有Teach Curves按钮。
RoboDK系统会根据手部位置实时计算并显示对应的机器人位姿,可视化显示机器人可达工作区域。
按住测头的第一个按钮,即可创建曲线。一旦要创建程序,你可以按下探头的第二个按钮,RoboDK 就会创建并模拟程序:
●持续按住测头【第一按钮】进行连续路径示教
●按下【第二按钮】生成并仿真运动程序
●长按【第二按钮】将程序发送至实体机器人执行
Video:如何使用 RoboDK TwinTrack 创建曲线:https://youtu.be/_Tu4dj88Vv4?t=44。
Note:你可以通过在菜单栏中选择:TwinTrack➔ Settings ,更改运行速度和其他设置,如程序名称模式。
坐标系标定技术
使用 RoboDK TwinTrack,你可以探测和定位坐标系(或参考坐标系),从而定位机器人工作区中的物体。
右键点击坐标系,选择 "Probe Reference"。
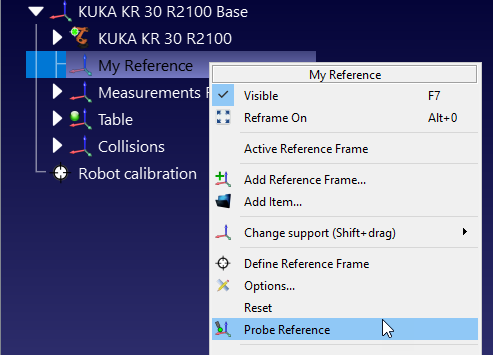
Tip: 如果没有自定义参考坐标系,请务必添加新的参考坐标系连接到机器人底座上(选择:程序➔添加参考坐标系)。
然后,你应按以下顺序探究 3 点:
1.原点的第一点。
2.沿着正 X 轴的第二个点。
3.沿着正 Y 轴的第三个点。
通过正确设置坐标系,你可以对机器人进行远程编程。例如,如果你有一个正确定义的夹具,当你想为一个新部件编程时,你只需在办公室或家里就可以完成,甚至无需靠近机器人。
Video:如何使用 RoboDK TwinTrack 创建坐标系:https://youtu.be/IP2UMXQk-nY?t=32。
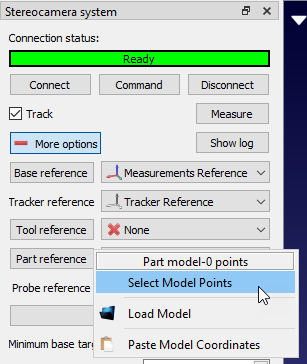
动态物体曲线示教
如果测量系统支持同时跟踪多个物体,则可以在移动物体上创建曲线、目标和坐标系。操作步骤与静态物体相同。
主要区别在于需要实时跟踪移动物体(使用跟踪器或反射目标)。例如,如果使用 Creaform C-Track 测量系统,则应在零件参考部分指定模型,并将其链接到所代表的坐标系。
需要在 RoboDK 中建立坐标系层级依赖关系,这样你就可以定义相对于移动目标的新坐标系。
这种零件编程方法可能不如静态零件编程准确,动态示教精度通常比静态模式低30-40%。
Note:建议缩短取样时间,以获得更准确的结果。
Video:动态曲线示教实例(Creaform HandyPROBE):https://youtu.be/EcIcLnLeOm8?t=28。
TwinTrack参数设置
本节介绍 TwinTrack 配置,通过这些设置可以更好地自定义TwinTrack 的默认行为。
在菜单栏中选择:TwinTrack➔Settings,打开下图所示的设置窗口。
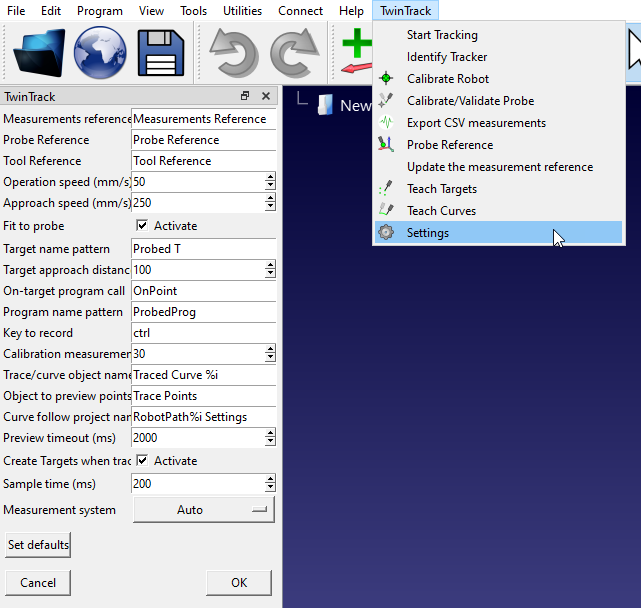
其中,你可以更改用于显示手持设备和参考坐标系的默认名称。你还可以自定义趋近速度和趋近距离。
Tip:将接近距离设置为 0 毫米,可禁用接近运动。这对喷涂或检测应用非常有用。
Tip:为获得最佳精度,可将采样时间增加到 500 毫秒或 1000 毫秒。如果增加采样时间,请确保缓慢移动。
Tip:如果手持式测头没有任何按钮,则可设置键盘的快捷键。
程序过滤
校准机器人后,我们需要确保生成过滤程序或考虑校准机器人参数,以确保利用机器人校准的优势。
在校准后,我们应遵循以下一种且仅一种方法对机器人进行精确编程:
1.使用 RoboDK 离线编程生成精确程序(生成的程序已过滤)。为获得最佳精度结果,建议使用此离线编程选项。
2.校准机器人控制器参数(如链路长度、DH-DHM 参数和/或主控参数)。
高精度离线编程
使用 RoboDK 校准机器人后,我们可以选择激活精确运动学,右键点击机器人,选择使用准确运动学模型。
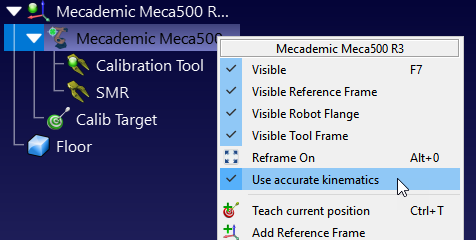
如果精度处于活动状态,我们将看到一个绿点;如果精度处于非活动状态,我们将看到一个红点。
建议使用此选项,以获得最佳精度结果。在 RoboDK 中激活机器人精度选项后,RoboDK 生成的所有程序都将自动过滤。这意味着,所有笛卡尔坐标都将稍作修改,以补偿机器人的误差。
如果你打算将机器人用于机器人加工、根据 NC 文件对机器人进行编程或使用 RoboDK 支持的任何 CAD/CAM 插件,这是最适合的选项。
Important:在生成程序时,请确保程序的第一个动作是关节动作,以保证准确性。
Important:生成程序后,请确保不要更改机器人配置。
Note:应确保工具中心点 (TCP) 和参考坐标系已在 RoboDK 中校准和定义(与过滤前实际设置中的值相匹配)。
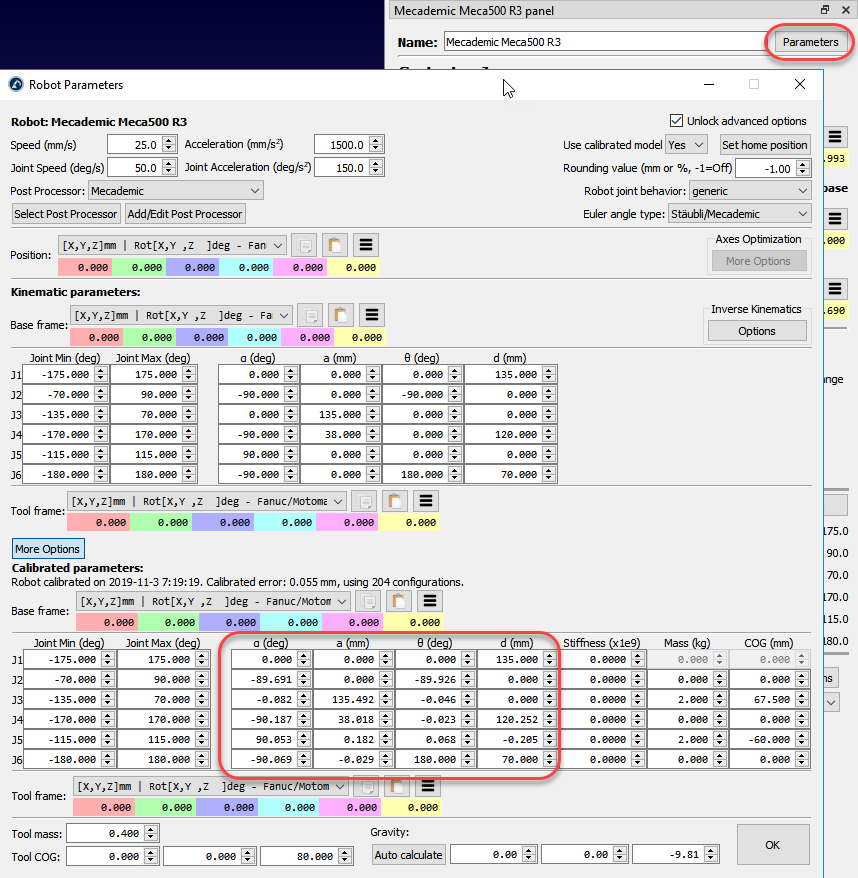
校准机器人参数
机器人校准后,你可以在参数菜单中访问校准参数。某些机器人控制器允许修改某些机器人参数。
Note:RoboDK 使用 Denatit-Hartenberg 修改约定。确保使用所有选定/校准参数。
Important: 更新机器人控制器参数时,应确保不会生成过滤程序。
参考坐标系和工具坐标系
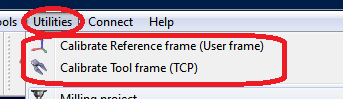
RoboDK 提供了一些校准参考坐标系和工具坐标系的实用程序。可以在菜单栏的这里找到这个功能:实用程序➔定义参考系和实用程序➔ 定义工具坐标系(TCP)。
要校准参考坐标系或未自动校准的工具(也分别称为用户坐标系和 TCP),我们需要一些接触 3 个或更多点的机器人配置,这些机器人配置可以是关节值或笛卡尔坐标(在某些情况下带有方向数据)。建议使用关节值而不是笛卡尔坐标,因为这样更容易在 RoboDK 中检查真实的机器人配置(将机器人关节复制粘贴到 RoboDK 主屏幕上)。
Important: 在校准机器人时,强烈建议使用关节值而不是笛卡尔坐标。如果我们使用关节值,机器人的精度就会被考虑在内,从而更准确地示教 TCP。
工具校准
选择实用工具➔ 校准工具,使用 RoboDK 校准 TCP。我们可以根据需要使用不同方向的任意多个点。点越多、方向变化越大越好,因为我们将获得更好的 TCP 估计值,以及对 TCP 误差的良好估计。
Note:更多信息请参见通用操作章节。
参考坐标系校准
在菜单栏中选择:实用程序➔定义参考系来校准参考坐标系。可以使用不同的方法设置参考坐标系。在图中的示例中,参考坐标系由三个点定义:点 1 和点 2 定义 X 轴方向,点 3 定义 Y 轴正方向。
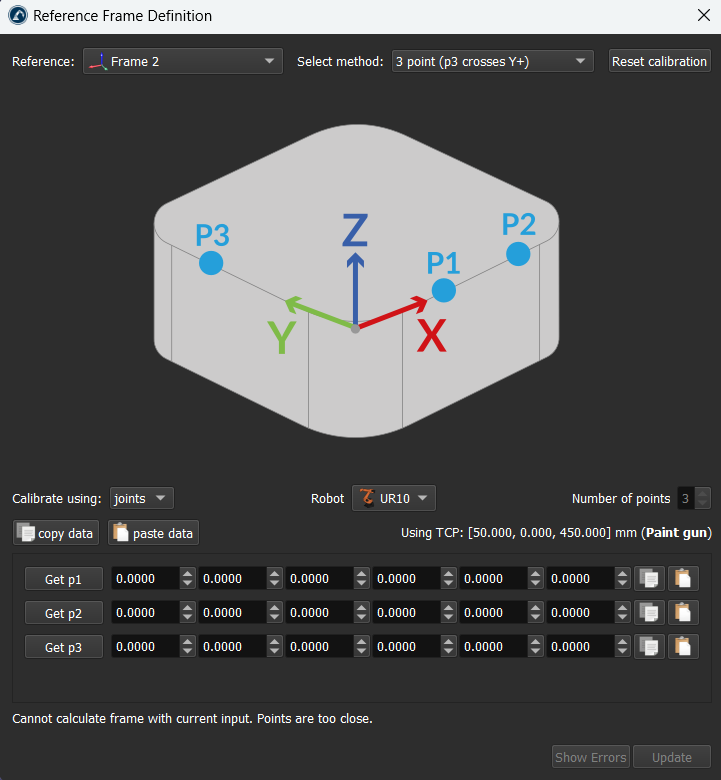
Important:建议在校准参考坐标系之前使用关节目标并激活机器人精度,因为机器人手臂的精度将有助于更好地定义参考坐标系。
Note:有关参考坐标系校准的更多信息,可以参考通用操作章节。
个性化TwinTrack
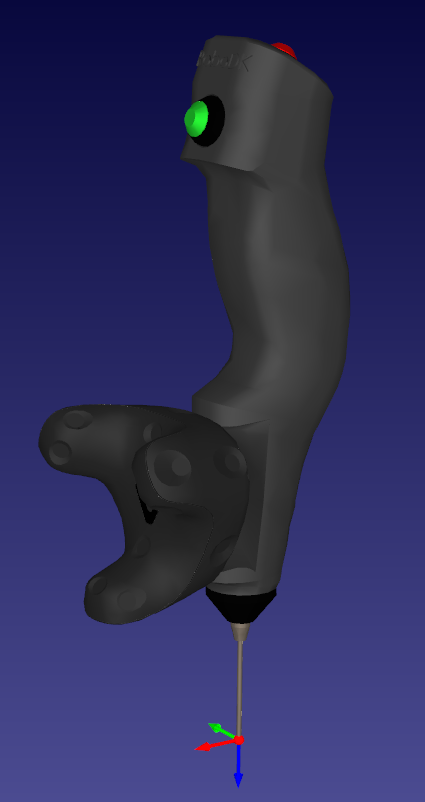
本节将介绍如何制作定制的 TwinTrack 探头,通过演示对机器人进行教学。定制探头可让你的机器人模仿人类教授的制造操作。

组装测头
参考以下组件清单,你可以构建与 RoboDK TwinTrack 配合使用的测头。
1.一个 HTC Vive Tracker(支持任何版本,建议使用 3.0):亚马逊上的 HTC Vive Tracker 3。预计售价:200 欧元。

2.两个 Valve Index 基站。实际上,只要与相应的 HTV Vive 追踪器兼容,任何版本都可以使用。亚马逊上的 Valve 基站。预计价格:两台均为 500 欧元。

3.两个三脚架,用于阀门基站。亚马逊上有样品。预计价格:100 欧元。

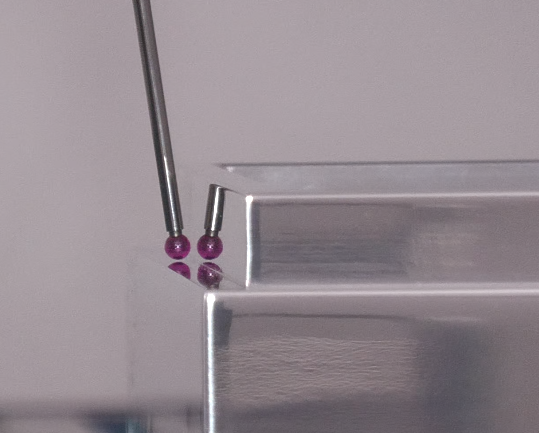
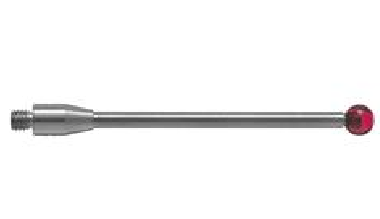
4.一个雷尼绍红宝石球,长 40 毫米,直径 4 毫米。如 A-5003-0060。估计价格:80 欧元。
5.两个按钮开关,一个红色,一个绿色,直径 12 毫米。按下按钮通电(闭合电路),松开按钮断电(开路):亚马逊上的产品示例。估计价格:15 欧元。

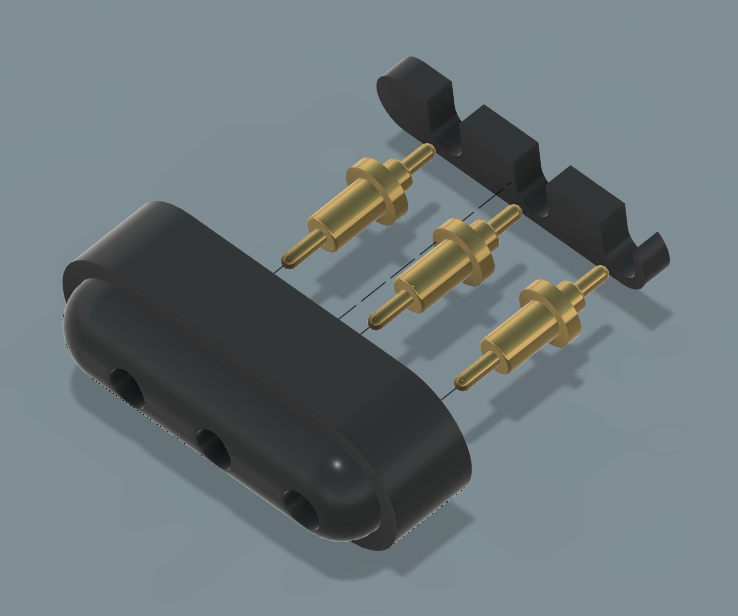
6.三个弹簧加载 pogo 销 0856-0-15-20-82-14-11-0(3 件)。样品来自 DigiKey .估计价格: 20 欧元。

7.连接开关的电线(少于 1 米)。在亚马逊上订购样品。估计价格:25 欧元。

8.一颗¼-20 x 1 "内六角扣头螺钉:亚马逊上样品。估计价格:10 欧元。

9.五个 3D 打印部件:主体、探针支架、顶部探针、跟踪器连接器和连接器帽。你可以在这里下载制作 TwinTrack 探头所需的 3D 打印部件。TwinTrack 探头的 3D 打印部件也可在GrabCad 和Thinginverse 上找到。


探头组件
本节介绍如何组装RoboDK TwinTrack探头。你需要上一节所述的部件,和一个焊锡套装。
组装探头步骤:
1.按以下步骤组装连接器,并将打印好的部件粘在一起。
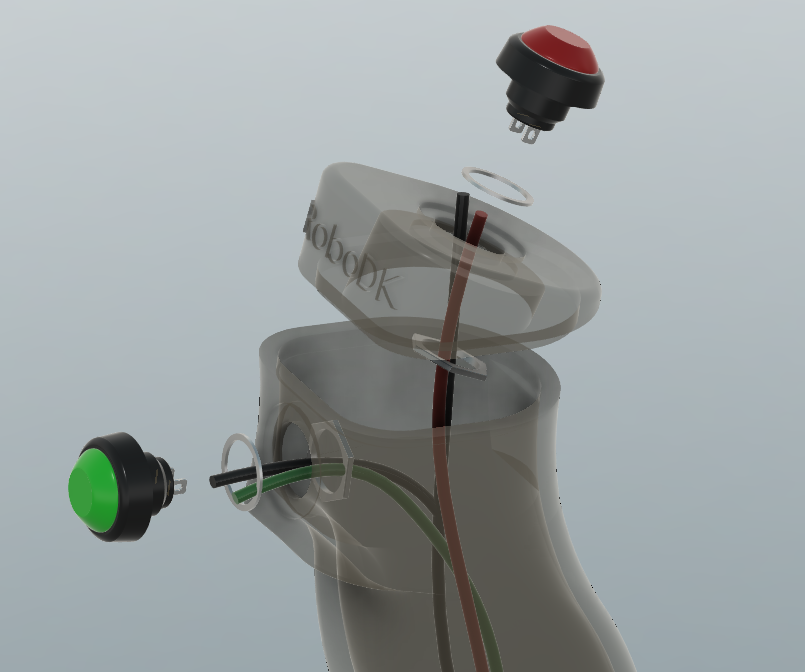
2.如下图所示,将电线安装在主体内部,并穿过顶盖。请注意,接地线连接到两个开关上。
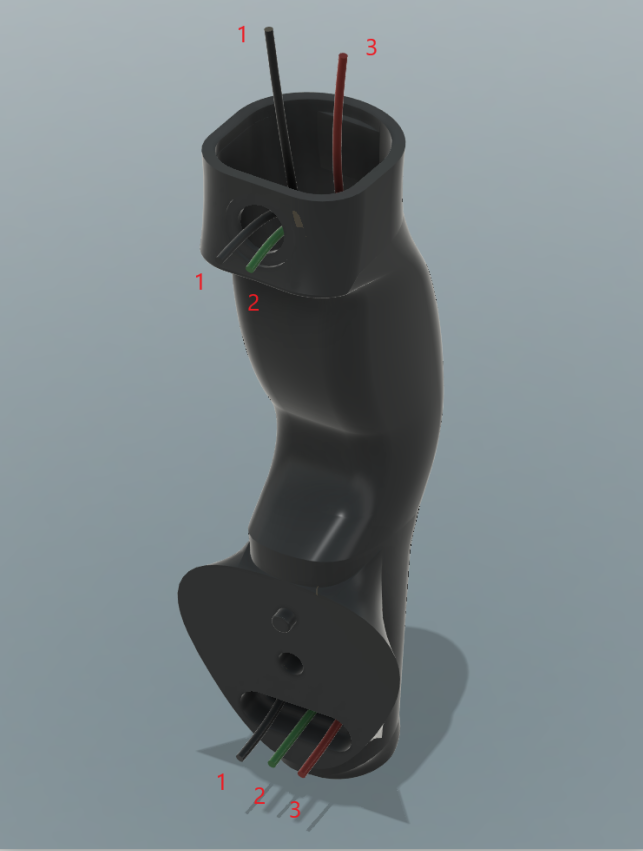
3.将电线连接到开关上。两对电线应穿过开关螺母。此外,红色按钮线束穿过顶部孔位。然后焊接开关(按顺序)。
Important:在焊接电线之前,不要忘记将线缆穿过开关螺母。
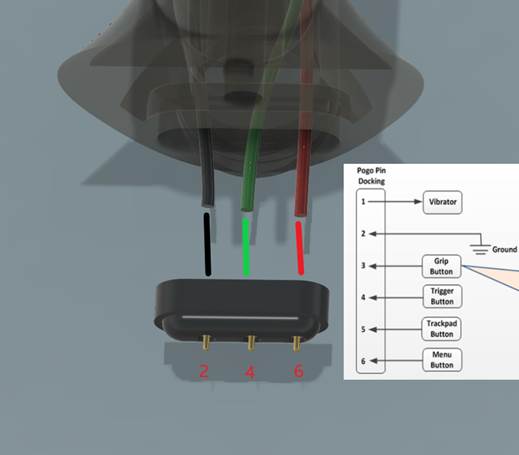
4.将连接器焊接到正确的导线上。确保将电缆放在正确的连接器上。
5.如下图所示组装探针的其余部分。
