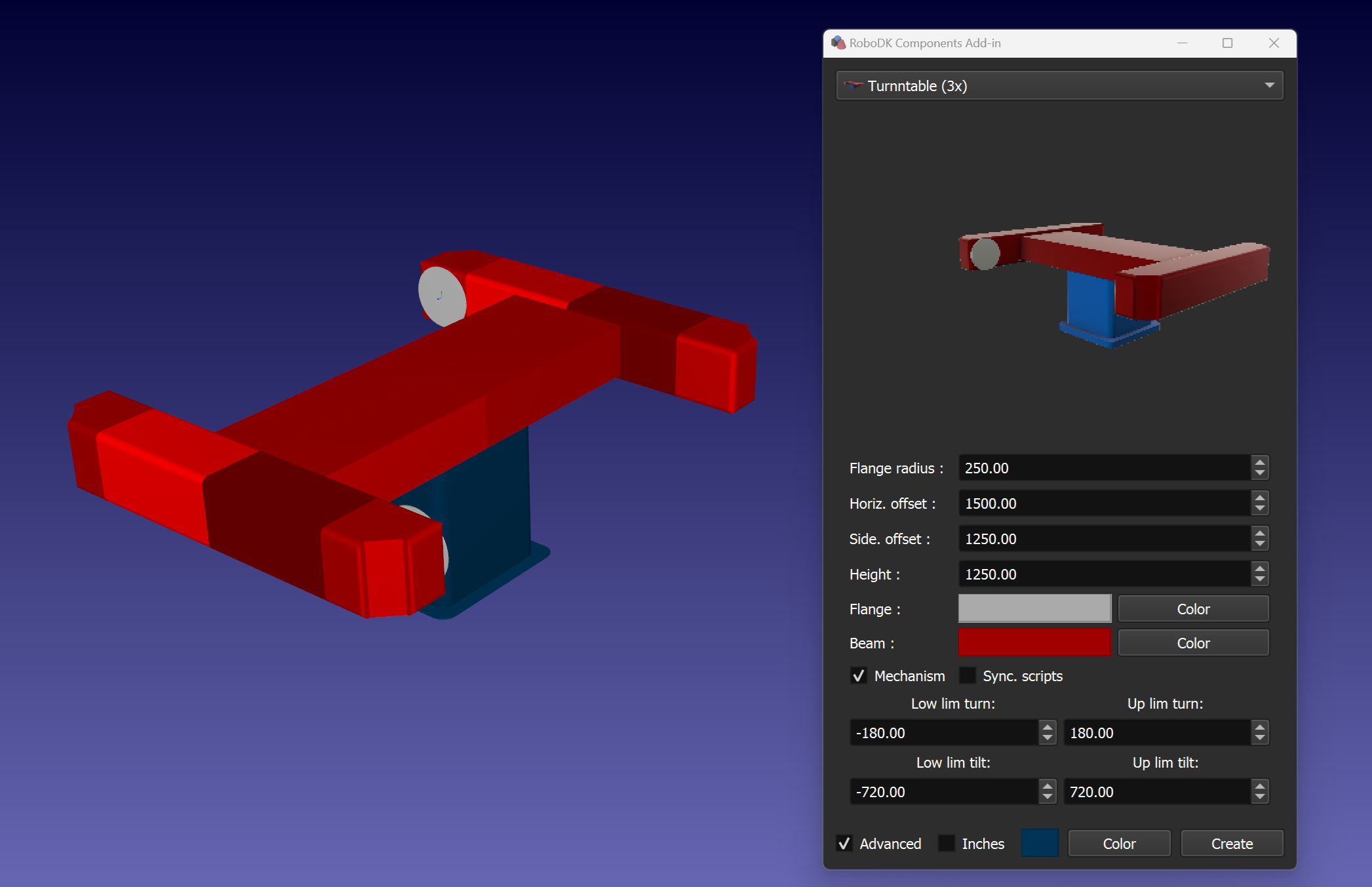
You can create a 3-axis positioner by specifying parameters such as flange radius, side and horizontal offsets, height, and colors for the base, beam, and flanges.
![Addin Shape - Image 13]()
Tip: Use the Mechanism checkbox to create a 3-axis positioner mechanism. You can additionally set the motion limits with the corresponding parameters.
Tip: Use the Sync. scripts checkbox to create additional Python scripts that will synchronize the robot with the required horizontal axis by running the corresponding script.
Note: By default, C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ is folder that contains the synchronization scripts examples.