Welding Add-In
English
Deutsch
Français
Italiano
Español
中文
한국어
日本語
Thai
Basic Guide
Installing RoboDK
Starting RoboDK
3D Navigation
Getting Started
RoboDK Library
Searching for Library Items
Library Categories
Library Actions
Toolbar Menu
Shortcuts
Reference Frames
RoboDK for Web
Browsing the library
Set Default Settings
Request support
RoboDK Requirements
Troubleshoot Issues
Getting Started
New RoboDK project
Select a robot
Add a Reference Frame
Import 3D objects
Create a Tool
Set a relative TCP
Move the Tool geometry
Create Targets
Add an Approach Program
Create Targets on Surface
Add a Retract Program
Main Program
Generate a Robot Program
Using Scripts
Interface
Robot Panel
Robot Tool (TCP)
Reference Frame
Robot Target
Robot Configurations
Object Settings
Main Menu
File Menu
Edit Menu
Program Menu
View Menu
Tools Menu
Utilities Menu
Connect Menu
Help Menu
Modern Icons
Options Menu
General tab
Station tab
Display tab
Motion tab
CAD tab
CAM tab
Program tab
Python tab
Drivers tab
Accuracy tab
Other tab
Robot Programs
Offline Programming
Create a Program
Program Instructions
Joint Move
Linear Move
Set Reference Frame
Set Tool Frame
Circular Move
Set Speed
Show Message
Pause
Program call
Set/Wait IO
Set Rounding value
Simulation event
Simulate Program
Generate Program
Transfer Program
Select Post Processor
Program generation settings
Convert circular to linear movements
Split large robot Programs
Inline subprograms
Post processors vs Drivers
Robot Manufacturing
Robot Machining Examples
Getting started with Robot machining
Getting started with Robot machining (5x)
Robot machining with external axes
Laser cutting
Robot Mold Machining
Robot deburring
Polishing
Setup for Machining
Robot Machining project
Path input
Program Events
Approach/Retract
Path to tool offset
Optimization parameters
Preferred Configuration
Update program
Robot Cutting
Robot Holds object
Curve Follow Project
Extract Features from 3D objects
Import Curves
Import a CSV file
Point Follow Project
Import Points
Robot 3D Printing Project
Post Processor for robot 3D printing
Tips and Tricks
Smaller/Larger References (-/+)
Rename Object (F2)
Show/Hide Robot Workspace (*)
Open your last project or file (Ctrl+1)
Show the Station Tree as a side window
Show or Hide Objects (F7)
Show or Hide the text on the screen (/)
Move Reference Frames or Objects (Alt)
Move a Robot Tool (Alt+Shift)
Reorder Items in the Tree
Reorder Items in the Tree without moving them
Change the size of the Station Tree
Teach a Robot Target (Ctrl+T)
Modify a Robot Target (F3)
Teach Robot Targets on a Surface
Move Robot Targets on a Surface (Alt+Shift)
Change the Robot Configuration
Check the status of a Robot Program (F5)
Faster Simulation (hold Spacebar)
Generate a Robot Program (F6)
Export a Simulation (Ctrl+E)
Send a Program to the Robot (Ctrl+F6)
Run the Program on the Robot
Display the Robot Trace (Alt+T)
General Tips
Define a Tool (TCP)
Define a Reference Frame
Align object with reference
Align robot references
Calibrate a Turntable
Calibrate a one-axis Turntable
Calibrate a two-axis Turntable
Importing STEP and IGES files
Display Performance
Export simulation
Export to RoboDK for Web
Export simulation to 3D HTML simulation
Export simulation to 3D PDF
Export simulation to Blender
Simulation Speed
Cycle Time
Change Color tool
Measure tool
Create a Mechanism or a Robot
How to model a one-axis turntable
How to model a one-axis linear rail
How to model a two-axis linear rail
How to model a three-axis Cartesian robot
How to model a two-finger parallel gripper
How to model a six-axis robot arm
How to couple robot joints together
Synchronize Additional Axes
Optimize External Axes
Add-ins
Add-ins
Add-in Manager
User Interface
Managing add-ins
Installing new add-in
Plug-in Interface
Apps
Create your RoboDK App
Add-in Creator
Creating or editing Add-ins
Adding assets to your Add-in
Compiling Python scripts
App configuration
Creating your Add-in Package
Submit your Add-in
File Manager
Installation
User Interface
Using File Manager
Limitations
Palletizing
Palletizing
Load the palletizing plugin
Setup Station
Create Pick and Drop
Create a palletizing project
Setup your palletizing project
Create Layer Design
Generate Robot Program
Computer Vision
Simulated Camera
Adding a camera view
Camera preview window
Camera settings
Accessing the simulated camera image through the API
Hand-eye calibration
Camera Simulation Examples
Barcode reading
Object detection
Display Panel
Display Panel Plugin
Create a display panel
Render images
OPC-UA
Enable the OPC-UA Add-in
OPC UA Server Example
Configure your OPC UA Server
Create your Own Station
Implementation with UaExpert
Add UaExpert Server
Connect to the Server
Server Nodes
RoboDK
SimulationSpeed
Station
Station parameters/Station Value
Time
Methods
getItem
getJoints
getJointsStr
setJointsStr
Implementation with Beckhoff TwinCAT 3
Add TwinCAT3 Server
Configure the Server
Add RoboDK Server Method
Auto Generate RoboDK Method
PLC Program Example
OPC UA Client Example
Implementation with Interface
Add Client
Client Nodes
Implementation with the RoboDK API
Installation
Script
Realistic Robot Simulation (RRS)
Requirements
RoboDK RRS Interface
RoboDK RRS for Comau (Add-in)
Components Add-In
Install
Components
Conveyor
Pedestal
Table
Fence
Rail
T-bot
H-bot
Turntable (1x)
Turntable (2x)
Turntable (3x)
Box
Sphere
Cone
Augmented Reality
Augmented Reality
Select and create a fiducial marker
Import the marker
Set up the simulated camera
Create a custom camera calibration file
Create a detection pipeline
Create an AR from a video feed
Mixed Reality
Welding Add-In
How To Install
Welding Interface
Instruction selection pull-down menu
Adding an instruction to the instruction list
Current instruction (selected)
Instruction code & icon color
Instruction name
Path shape
Add instructions to the program sequence
Delete instruction from the list
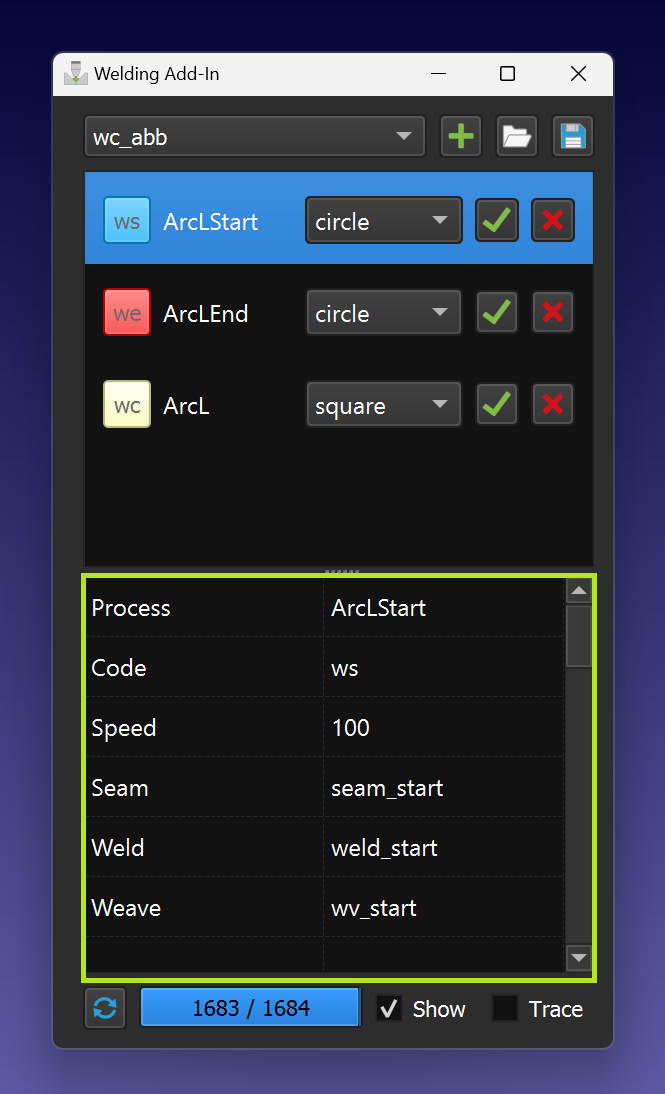
Parameters
Parameters import/export
Path building
Path tracing
Supported post processors
ABB welding templates
Fanuc welding templates
Kawasaki welding templates
KUKA welding templates
Motoman welding templates
RoboDK CNC
Install the RoboDK CNC add-in
RoboDK CNC User Interface
Workflow Example
IO Monitor Plugin
Opening IO Monitor
IO Monitor Edit tab
Blender Export Add-in
Plugins for CAD/CAM
RoboDK Add-Ins for CAD/CAM Software
RoboDK Plugin for BobCAD-CAM
BobCAD-CAM Introduction
BobCAD-CAM Install
Toolbar
Robot setup
Update selected operations
Generate program
Plugin Settings
RoboDK Plugin for FeatureCAM
Introduction
Add-In set up
Commands
Auto Setup
Generate robot programs
Plugin Settings
Examples
3-Axis Robot Machining
5-Axis Robot Machining
RoboDK Add-In for Fusion 360
Install
Fusion 360 Toolbar
Settings
Examples
Laser Cutting
Glue Dispensing
Robotic Deburring
Manual Install
RoboDK Plugin for hyperMILL
hyperMILL Introduction
hyperMILL Setup
hyperMILL Workflow
RoboDK Add-In for Inventor
Install
Inventor Toolbar
Settings
Examples
Robot Polishing
Robot Cutting/Grinding
Manual Install
RoboDK Plugin for Mastercam
Introduction
Add-In set up
Toolbar
Robot setup
Update selected operation(s)
Generate robot programs from Mastercam
Plugin Settings
Examples
3-Axis Robot Machining
5-Axis Robot Cutting
Manual Install
RoboDK Plugin for MecSoft
Introduction
RhinoCAM Setup
Workflow
Simulate robot machining
Generate robot programs
RhinoCAM Examples
3-Axis Robot Machining with RhinoCAM
5-Axis Robot Machining with RhinoCAM
RoboDK Add-In for Onshape
Install
Toolbar
RoboDK Add-In for Rhino
Install
Rhino Toolbar
Grasshopper Toolbar
Settings
Examples
Engraving a dome
Dome stripes
Grasshopper Example
Manual Install
RoboDK Add-In for Siemens Solid Edge
Install
Solid Edge Toolbar
Settings
Examples
Robot Polishing
Manual Install
RoboDK Add-In for SolidWorks
Install
SolidWorks Toolbar
Settings
Examples
Robot Welding
Liquid dispensing
Propeller Example
Manual Install
Collision Detection
Collision Detection
Collision Map
Faster Collision Detection
Collision Avoidance for Robot Machining
Collision-Free Motion Planner
Using the PRM Motion Planner
Setup for Motion Planning
Constrain Joint Limits
Select the PRM Parameters
Generate Roadmap
Link Targets
Link Programs
Add New Targets to Map
Tips and Best Practices
Examples
Robot Machining
Introduction
Robot Machining Example (3-Axis)
Machining program in RhinoCAM
Robot machining project (3x)
Create Robot Machining Path
Simulate the robot machining operation
Customize the tool orientation
Generate the robot programs
Change the Post Processor
Robot Machining (5x)
Introduction
Robot Machining Example (5-Axis)
Machining program in RhinoCAM
Robot machining project (5x)
Select your robot
Create the robot machining coordinate system
Customize the tool orientation
Safe transitions between robot machining jobs
Robot Welding
Introduction
Robot welding example
Setup
2D sketch from SolidWorks
Spot welding
Requirements
Workflow
Station components
Spot Welding Gun
Spot Welding Points
Trajectory planning
Collision detection
Program sequence
Cycle Time estimation
Generate Robot program
Welding with Positionner
Introduction
Robot welding example
Model import
Path import
Curve Follow Project setup
Welding Add-in usage
Program generation
Polishing
Introduction
Polishing example
Setup
3D sketch from Inventor
RoboDK station
Deburring
Introduction
Plastic deburring example
Setup
2D sketch from Fusion 360
RoboDK station
Dispensing
Introduction
Liquid dispensing example
Setup
2D sketch from SolidWorks
RoboDK station
Mold Machining
Introduction
3-Axis Mold Robot Machining
RoboDK settings
Machining toolpath in Mastercam
Robot Machining in RoboDK
Robot Cutting
Introduction
5-Axis robot cutting
RoboDK settings
Cutting toolpath in Mastercam
Robot cutting in RoboDK
Laser Cutting
Introduction
Laser cutting example
Setup
Method 1: Feature extraction
Method 2: Fusion 360 laser cutting features
Robot Tips
ABB robots
Transfer a robot program
Start a robot program
Retrieving the TCP
Transfer programs via FTP
RoboDK driver for ABB
Brooks robots
Gripper Simulation
Linear Rails
Post Processor
Tool Center Point (TCP)
Gripper
Rounding
Speed and Acceleration
Pause
Transfer Programs Via FTP
Start A Robot Program
Comau robots
Transfer a robot program
Post Processor
Driver
Denso robots
How to Enable the b-Cap server
Run Programs from the PC
RoboDK driver for Denso
Fanuc robots
Transfer a robot program
Start a robot program
Retrieve robot joints
Retrieve the Robot Tool (TCP)
Setup Fanuc’s FTP Server
RoboDK driver for Fanuc
Driver Configuration
Program Compilation (LS vs. TP)
Updating controller kinematic parameters
Han’s robots
Transfer a program to the Han’s Controller
Hanwha robots
RoboDK driver for Hanwha
JAKA robots
Send a Program to the JAKA Controller through RoboDK
Manually Import a Program to the JAKA Controller
Manually replace the robot reference frame
Manually replace the robot tool (TCP)
Start a robot program
RoboDK driver for JAKA
Retrieving the IP address from the JAKA virtual simulator
KEBA Controllers
Retrieve the KEBA Controller IP
Run a Program on the KEBA controller
Run Program from RoboDK
Using PPK file for SFTP
KUKA robots
Transfer a robot program
Post Processor behavior
Start a robot program
Retrieving the TCP
Retrieving the robot joints
Administrator mode
RoboDK driver for KUKA
Changing the C3 Bridge Server port number
Automatic configuration using a script
Automatic configuration
Manual configuration
Legacy driver for KUKA (Kukavarproxy)
Troubleshooting
Checking the availability of port 7000
Uninstalling legacy driver
Configuration error
External axes
Robot calibration
Mecademic
Retrieve the Mecademic robot IP
Run a Program on the Mecademic controller
How to load a script file
How to run a PY file
Run Program from RoboDK
Other tips
Offline programs
Speed units
Yaskawa Motoman robots
RoboDK driver for Yaskawa Motoman
Update Pulses per degree information
Omron-TM Robots
Transfer a file via USB
Setup Listen Node
Universal Robots
Retrieve the UR robot IP
Run Program from RoboDK
How to enable Remote Control on URe
Run a Program on the UR controller
How to load a URP program
How to load a Script file
Transfer a Program (FTP)
UR Monitoring
Using the RobotiQ gripper
Using the RobotiQ gripper from RoboDK
Using the RobotiQ gripper with the driver
Circular vs Linear movements
URSim Installation guide
Download URSim requirements
VirtualBox
Shared Folder between Windows and URSim
Use the RoboDK Driver with the UR Sim
Update Robot Kinematics
Post Processors
Select a Post Processor
Post Processor Editor
Modify a Post Processor
Modification Examples
Generate all programs in one file
Force a speed limit
Custom filter for frames
Impose a movement using joint angles
Available Post Processors
Reference
Virtual Reality
Virtual Reality Actions
Display Performance
Virtual Reality Quality
View Manager
Connecting a Meta Quest Headset
RoboDK API
Python API
Python Simulation
Python OLP
Python Online Programming
Troubleshooting Python setup in RoboDK
C# API
C# Simulation
C# OLP
C# Online Programming
MATLAB API
Simulink Example
Command Line Options
Robot Drivers
How to use Robot Drivers
Using the GUI
Using the API
Customize Robot Drivers
Troubleshoot
Ping test
Set a Static IP
Accuracy
RoboDK TwinTool
Introduction
Requirements
Linear gage sensor
Calibration Setup
Customized setup
Calibration Wizard
Calibration Results
Validation
Validate the tool calibration
Settings
Calibration Settings
RoboDK TwinTrack
Introduction
Requirements
Setup with SteamVR and HTC Vive Trackers
Setup
System Calibration
Robot calibration
Probe calibration
Programming offline
Teach Targets
Teach Curves
Teach a coordinate system
Teach Curves in Motion
Settings
Program Filtering
Accurate Offline Programming
Calibrate robot parameters
Reference frame and tool frame
Tool calibration
Reference frame calibration
Custom TwinTrack Probe
Hardware components
Probe Assembly
Robot Calibration (Laser Tracker)
Introduction
Requirements
Offline Setup
RoboDK station
Generate calibration targets
Robot calibration setup
Connect to the tracker
Connect to the robot
Measuring the reference targets
Robot calibration
Measuring the base
Measuring the tool
Calibration
Validation
Results
Program Filtering
Filter Programs using the API
Filter Targets using the API
Robot Mastering
Reference frame and tool frame
Tool calibration
Reference frame calibration
Annex I – Mastering for axes 1 and 6
Axis 6 reference
Axis 1 reference
Annex II – Test the Faro laser tracker
Robot Calibration (Optical CMM)
Introduction
Requirements
Offline setup
RoboDK station
Generate calibration targets
Robot calibration setup
Probing reference frames
Connect to the tracker
Connect to the robot
Robot calibration
Measuring the base
Measuring the tool
Calibration
Validation
Results
Program Filtering
Filter Programs with the API
Filter Targets with the API
Robot Mastering
Reference frame and tool frame
Tool calibration
Reference frame calibration
Annex I – Mastering for axes 1 and 6
Axis 6 reference
Axis 1 reference
Robot ballbar testing
Introduction
Test Requirements
Offline Preparation
Create a RoboDK station
Editing the ballbar test parameters
Test ballbar
Ballbar test report
ISO9283 Performance Testing
Introduction
Requirements
Offline Setup
Position Accuracy and Repeatability
Path Accuracy
Results
Parameters
You can change parameters directly in the parameter table. The changes can be saved automatically.
×
Close